经济型 电动滑台 交叉滚柱型 X轴 重复定位精度±1.5μ


限时特价
当天发货
可按购买数量进行折扣
经济型 电动滑台 交叉滚柱型 X轴 重复定位精度±1.5μ
型号:
重选 
型号:
请确定型号
原价:
单价(未税):
购买条件:
发货日:
基本信息
规格表
FAQ
2024年11月接线图有更新请以网页为准进行确认
经济型自动滑台系列一览表




产品概述
米思米E-XMCRH系列电动滑台是一款搭载两相步进电机的经济型滑台。可作为自动化设备位置调整用滑台使用,主体采用铝合金,重量轻,进行黑色阳极氧化处理。采用滚珠丝杠传动,导向方式上采用交叉滚柱导轨,可满足必要使用精度。通过对结构简化,改善加工工艺,价格得以大幅降低。
产品特点
特点1:适用于小行程频繁调节。
特点2:通过本土化生产,优化结构,实现低价格。
特点3:本体表面处理采用黑色阳极氧化处理,能有效阻止光的反射,尤其使用于光学领域。
特点4:标配的驱动器适配双脉冲及脉冲+方向控制,可满足多工况使用
特点2:通过本土化生产,优化结构,实现低价格。
特点3:本体表面处理采用黑色阳极氧化处理,能有效阻止光的反射,尤其使用于光学领域。
特点4:标配的驱动器适配双脉冲及脉冲+方向控制,可满足多工况使用
使用方法
E-XMCRH系列X轴滑台搭载两相步进电机,需要配合米思米两相步进电机驱动器、电缆,以及客户自备的24V电源、上位机(PLC或运动控制卡)使用,其各个产品之间的连接示例如下图所示。


相关文件
■脉冲驱动器
适配的驱动器支持双脉冲及脉冲+方向控制。安装尺寸及使用说明书可参考:E-DR42C
适配的驱动器支持双脉冲及脉冲+方向控制。安装尺寸及使用说明书可参考:E-DR42C
注意事项
■滑台使用环境
使用环境:10~50℃,20~70%RH(非结露)
推荐使用环境:22±5℃,20~70%RH(非结露)
请避免在如下环境中使用滑台产品
①粉尘环境(尤其是金属粉末)
②有阳光直射,热辐射的环境
③临近火源
④有腐蚀性气体,可燃性气体的环境
⑤飞溅水,油的环境
⑥有传到强震动与冲击的环境
⑦有机溶液,盐分较多的环境
■关于滑台的保养
基于润滑脂的种类,以及使用环境的不同,并没有统一的定期保养标准。根据驱动条件以及导轨种类的不同,请务必保证每月1次的频率进行润滑脂的确认。
使用环境:10~50℃,20~70%RH(非结露)
推荐使用环境:22±5℃,20~70%RH(非结露)
请避免在如下环境中使用滑台产品
①粉尘环境(尤其是金属粉末)
②有阳光直射,热辐射的环境
③临近火源
④有腐蚀性气体,可燃性气体的环境
⑤飞溅水,油的环境
⑥有传到强震动与冲击的环境
⑦有机溶液,盐分较多的环境
■关于滑台的保养
基于润滑脂的种类,以及使用环境的不同,并没有统一的定期保养标准。根据驱动条件以及导轨种类的不同,请务必保证每月1次的频率进行润滑脂的确认。
使用案例
| 电子/家电 | 汽车 | 医疗 | ||
 |  |  | ||
| 智能手机 | 半导体 | 锂电池 | ||
 |  |  |

 材质:铝合金
材质:铝合金
 表面处理:阳极黑色
表面处理:阳极黑色
 上图为选择盖板L时的情况。选择盖板R时的详细尺寸请通过CAD数据进行确认。
上图为选择盖板L时的情况。选择盖板R时的详细尺寸请通过CAD数据进行确认。
驱动器:本系列使用的驱动器型号:E-DR42C。
线缆:本系列使用的线型号:D-SUB15-2M(2米线)/D-SUB15-4M(4米)。
多轴组合:咨询涉及本系列多轴组合对应邮箱:dz@misumi.sh.cn。
■通用规格
■连接器针排列

■时序图
脉冲驱动器

尺寸图

 材质:铝合金
材质:铝合金 表面处理:阳极黑色
表面处理:阳极黑色 上图为选择盖板L时的情况。选择盖板R时的详细尺寸请通过CAD数据进行确认。
上图为选择盖板L时的情况。选择盖板R时的详细尺寸请通过CAD数据进行确认。规格表
| 型式 | 滑台 长度 (mm) |  盖板 位置 |  马达 马达 |  驱动器 驱动器 |  电缆 电缆长度 (m) | 机械规格 | 精度规格 | 传感器 | ||||||||||||
 Type Type |  类型 类型 | 移动量 (mm) | 耐负载 (N) | 自重 (kg) | 分辨率 (脉冲) | 最大 速度 | 单向定位 精度 | 重复定位 精度 | 无效 运动 | 平行度 | 直线度 | 运动 平行度 | 限位 传感器 | 原点传感器 (ORG1) | ||||||
| E-XMCRH | X轴 | 40 | 40×40 | L | 空白 (配标准 步进马达) | A (单轴脉冲 驱动器) | 2 (2米电缆) 4 (4米电缆) | 15 | 58.8 | 0.3 | 5μm | 10 | 15μm | ±1.5μm | 5μm | 30μm | 10μm | 15μm | 有 | 有 |
| R | ||||||||||||||||||||
| 60 | 60×60 | L | 20 | 78.4 | 0.5 | |||||||||||||||
| R | ||||||||||||||||||||
| 80 | 80×80 | L | 30 | 98 | 0.8 | |||||||||||||||
| R | ||||||||||||||||||||
| 100 | 100×100 | L | 40 | 137.2 | 1 | |||||||||||||||
| R | ||||||||||||||||||||
| 120 | 120×120 | L | 70 | 176.4 | 1.2 | |||||||||||||||
| R | ||||||||||||||||||||
驱动器:本系列使用的驱动器型号:E-DR42C。线缆:本系列使用的线型号:D-SUB15-2M(2米线)/D-SUB15-4M(4米)。多轴组合:咨询涉及本系列多轴组合对应邮箱:dz@misumi.sh.cn。■通用规格
| E-XMCRH40 | E-XMCRH60 | E-XMCRH80 | E-XMCRH100 | E-XMCRH120 | ||
| 进给丝杠 | 滚珠丝杠Φ6、导程1mm | 滚珠丝杠Φ8、导程1mm | ||||
| 导轨 | 交叉滚柱导轨 | |||||
| 马达 | 类型 | 2相标准步进马达 1.3A/相 | 2相标准步进马达 2.0A/相 | |||
| 步距角 | 1.8° | |||||
| 脉冲驱动器 | 电源电压 | 24~36VDC | ||||
| 输出电流 | 0.3A~2.2A/相(峰值) | |||||
| 脉冲信号电压 | 5VDC | |||||
| 脉冲输入方式 | 脉冲+方向或双脉冲 | |||||
| 细分数 | 200~25600 | |||||
| 连接器 | 型式 | HDB-15F-T03-31(亚当) | ||||
| 接收侧型式 | HDB-15M-T03-31(亚当) | |||||
| 传感器基板 | 电源电压 | DC24V±10% | ||||
| 传感器型式 | 微型光传感器EE-SX4320(欧姆龙) | |||||
| 控制输出 | NPN开路集电极输出 | |||||
| 输出逻辑 | 检测(遮光)时:输出晶体管OFF(非导通) | |||||
■连接器针排列

■时序图
脉冲驱动器

关于此商品的常见问题 (FAQ)
电动滑台调试时,有丢步现象
多种因素会导致该现象
1、负载过重,超出滑台最大负载,应减小负载或重新选型
2、速度过快,超出滑台最大速度,应降低速度或重新选型
3、工况使用有悬臂,有弯矩负载,尽量把负载中心设置在滑台面中心
1、负载过重,超出滑台最大负载,应减小负载或重新选型
2、速度过快,超出滑台最大速度,应降低速度或重新选型
3、工况使用有悬臂,有弯矩负载,尽量把负载中心设置在滑台面中心
滑台传感器是PNP输出还是NPN输出
标配传感器是NPN常闭输出类型
滑台接线标准
滑台执行电工作业前需明确阅读接线图后作业,避免异常
滑台行程设置
滑台上电调机前需明确检查程序,确认已开启感应极限碰触停止机能,避免超行程撞击异常
可以特殊设定包装类型吗
可以根据需要评估指定包装类型
有粉尘或脏污环境可以使用吗
尽量避免以下场所使用
1、较多粉尘或脏污环境,特别是金属粉多的环境
2、靠近火烛、有水或油多的环境
3、有腐蚀性气体、可燃性气体的环境
1、较多粉尘或脏污环境,特别是金属粉多的环境
2、靠近火烛、有水或油多的环境
3、有腐蚀性气体、可燃性气体的环境
高湿度(70~90%等)环境下可以使用吗
高湿度环境,钢制部件、导轨部件可能会生锈,油脂润滑保持性降低,不推荐使用
电动滑台位置调整,有噪音且精度也不好
滑台安装面平面度不好,会使滑台组装时锁紧面变形,影响精度和丝杆运转噪音。建议平面度控制在0.01mm以内
润滑脂加注方法
1、可使用高精度酒精先擦去所能看到使用过的油脂
2、用注射或涂抹的方式涂在轨道及丝杆滚道内
3、每加注一次润滑脂全行程运动一次,加注3~5次油脂
4、将溢出多余油脂擦拭干净
2、用注射或涂抹的方式涂在轨道及丝杆滚道内
3、每加注一次润滑脂全行程运动一次,加注3~5次油脂
4、将溢出多余油脂擦拭干净
导轨润滑脂有推荐品牌和型号吗
建议使用油脂牌号THK AFB-LF
常被一起浏览的商品
常被一起购买的商品
相关产品集合页
您还有2项规格未选
经济型 电动滑台 交叉滚柱型 X轴 重复定位精度±1.5μ
28个备选型号

重置

| 数量 | 未税单价 (元) | 发货日 |
|---|
网页端、APP、小程序商品浏览记录打通
登录状态下多平台可同步浏览商品
登录状态下多平台可同步浏览商品
1
在电脑浏览器中打开米思米官网并登录
2
在顶部点击【个人中心-商品浏览记录】后即可查看扫码商品
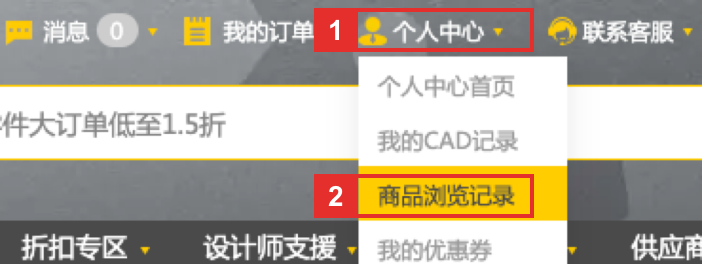
*如果没有出现记录可以尝试刷新浏览器页面。
我知道了
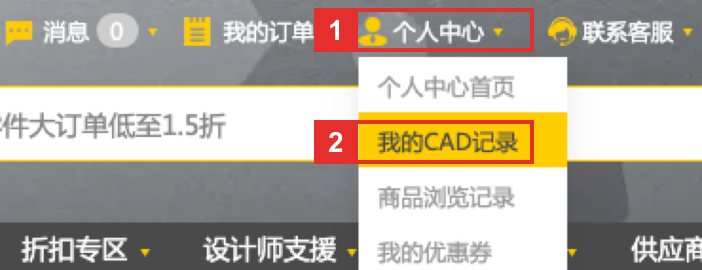
请在米思米官网查看下载的CAD
1
在电脑浏览器中打开米思米官网并登录
2
在顶部点击【个人中心-我的CAD记录】后即可查看本商品