高精度 自动旋转 滚珠丝杠型


限时特价
当天发货
可按购买数量进行折扣
高精度 自动旋转 滚珠丝杠型
型号:
重选 
型号:
请确定型号
原价:
单价(未税):
购买条件:
发货日:
基本信息
规格表
FAQ
产品概述
米思米RMBG系列自动旋转滑台采用滚珠丝杠传动。最适用于高精度、微小范围角度定位,且可应用于高频往复调节的场合。
 附件:
附件:
RMBG40C:SCB3-25 3个
RMBG60C:SCB4-25 3个
产品特点
特点1: 采用滚珠丝杠传动,精度高。
特点2: 最适用于微小角度高频往复调节。
特点3: 本体表面处理采用黑色阳极氧化处理,能有效阻止光的反射,尤其适用于光学领域。
特点2: 最适用于微小角度高频往复调节。
特点3: 本体表面处理采用黑色阳极氧化处理,能有效阻止光的反射,尤其适用于光学领域。
规格概述
| Type |  材质 材质 |  表面处理 表面处理 | 行程(θ角度) (deg) | 耐负载(N) | 重复定位精度 |
| RMBG | 铝合金 | 黑色阳极氧化处理 | ±5.5°~±8.5° | 39.2~58.8 | ±0.003°以内 |
 附件:
附件:RMBG40C:SCB3-25 3个
RMBG60C:SCB4-25 3个
使用方法
■接线方法
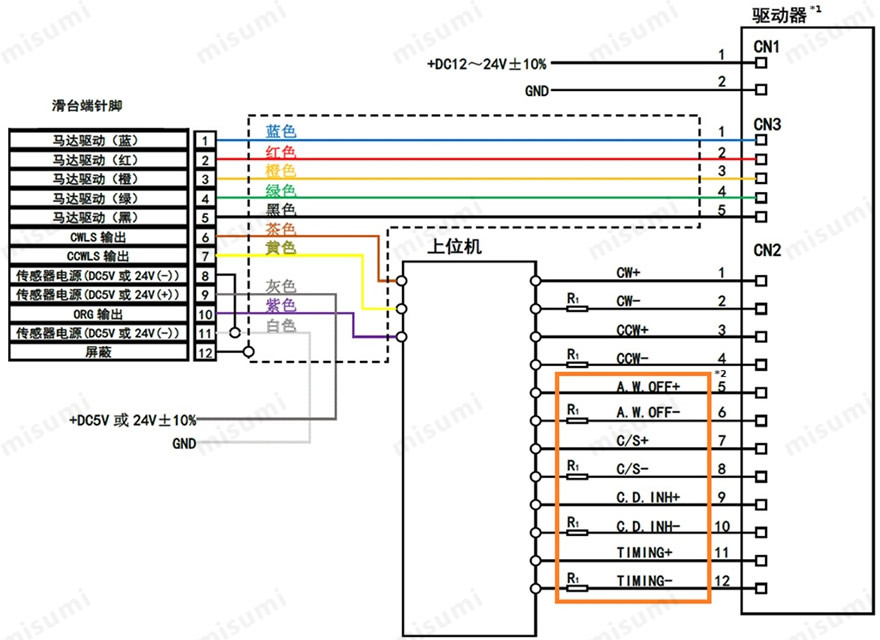
旋转滑台需要配合DC24V驱动器(MSDR24-MS)、驱动器用电缆(MSDR24-CB)、滑台用电缆(如MSCB4B),以及客户自备的24V电源、上位机(PLC或运动控制卡)使用,其各个产品之间的连接示例如下图所示。
*1驱动器MSDR24-MS详细请点击 此处
此处
*2驱动器CN2引脚,只需要连接1-4,5-12可以不用连接便可正常使用。
上位机的针脚定义请咨询贵司使用的上位机品牌供货商。
上位机输出电压请设置为5V。超过5V时,需要串联一个电阻R1, 将电流降低到7~20mA以下 ,避免烧毁驱动器。
使用驱动器引脚11和12时,有信号输出。若输出电压超过DC24V,请串联一个电阻,使其电流降低至10mA以下,防止烧毁驱动器。
滑台传感器电源的具体电压规格烦请参考具体滑台商品说明【电气规格】参数。
■安装方法
①请使用底板上开设的4个螺栓孔,通过附属螺丝进行固定。RMPG系列为3点固定。
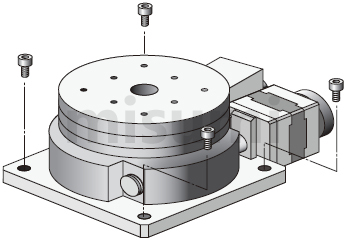
②在滑台上面、下面安装的对象物
如果安装平面度粗糙的工件或安装到平面度较粗的物体上时,可能导致滑台面变形,影响精度。
敬请注意。【平面度的参考标准:10μm以内】
③滑台的安装姿势
各产品的性能以设置到平面时作为条件。颠倒安装、侧面垂直或侧面水平安装等平面设置之外使用时,需要加以注意。
因其安装姿势不同,耐负载及精度将发生很大变化。关于可否使用,请以下列各产品的姿势特性表为大致标准。
将向您介绍符合使用条件的最佳机构产品、使用方法,敬请咨询。
(*1)还可以选择4m、6m的电缆。
上表粉色背景中所需产品需要客户自备。
上表为使用PLC控制时的构成示例之一。其他构成示例请点击此处。
旋转滑台需要配合DC24V驱动器(MSDR24-MS)、驱动器用电缆(MSDR24-CB)、滑台用电缆(如MSCB4B),以及客户自备的24V电源、上位机(PLC或运动控制卡)使用,其各个产品之间的连接示例如下图所示。

*1驱动器MSDR24-MS详细请点击
 此处
此处*2驱动器CN2引脚,只需要连接1-4,5-12可以不用连接便可正常使用。
上位机的针脚定义请咨询贵司使用的上位机品牌供货商。上位机输出电压请设置为5V。超过5V时,需要串联一个电阻R1, 将电流降低到7~20mA以下 ,避免烧毁驱动器。使用驱动器引脚11和12时,有信号输出。若输出电压超过DC24V,请串联一个电阻,使其电流降低至10mA以下,防止烧毁驱动器。滑台传感器电源的具体电压规格烦请参考具体滑台商品说明【电气规格】参数。■安装方法
①请使用底板上开设的4个螺栓孔,通过附属螺丝进行固定。RMPG系列为3点固定。

②在滑台上面、下面安装的对象物
如果安装平面度粗糙的工件或安装到平面度较粗的物体上时,可能导致滑台面变形,影响精度。
敬请注意。【平面度的参考标准:10μm以内】
③滑台的安装姿势
各产品的性能以设置到平面时作为条件。颠倒安装、侧面垂直或侧面水平安装等平面设置之外使用时,需要加以注意。
因其安装姿势不同,耐负载及精度将发生很大变化。关于可否使用,请以下列各产品的姿势特性表为大致标准。
将向您介绍符合使用条件的最佳机构产品、使用方法,敬请咨询。
| ▼各产品的姿势特性表 | ||||
| 型式 | 移动导轨【进给方式】 | 颠倒使用 | 侧面水平使用 | 侧面垂直使用 |
| RMBG | 向心球轴承【滚珠丝杠式】 | ○ | ○ | ○ |
| RMPG/RMWG | 滚珠轴承【蜗轮式】 | ○ | ○ | ○ |
| ○虽然对负载和力矩有所限制,但可以使用 | ||||
相关产品
| 分类1 | 分类2 | 型式(例) | 数量 | 备注 | 页码 | |
| 自动滑台本体 | 自动X轴滑台 | XMSG413- LA5-C-N |  | 1 | 自动X轴直线滚珠导轨型滑台 | P.1713 |
| 控制部件 | 驱动器 | MSDR24-MS |  | 1 | 微步控制驱动器 输入电源:DC24V | P.1738 |
| DC24V电源 | - | - | 请客户自备 | |||
| 控制设备 (PLC定位组件/PC+运动控制卡等) | - | - | 请客户自备 | |||
| 电缆 | 自动滑台本体⇔驱动器 (一端散线) | MSCB2B |  | 1 | 一端散线的2m常规电缆 (*1) | P.1739 |
| 驱动器用电缆(线束) | MSDR24-CB |  | 1 | 驱动器用连接器已进行电缆配线,无需连接器的压接作业。 | P.1738 | |
上表粉色背景中所需产品需要客户自备。上表为使用PLC控制时的构成示例之一。其他构成示例请点击此处。相关文件
■自动滑台相关参数介绍请点击此处。
■控制器MSDR24-MS的使用说明书请点击此处。
■RMPG系列自动旋转滑台的特长、使用方法等介绍请点击此处。
此处。■控制器MSDR24-MS的使用说明书请点击
此处。■RMPG系列自动旋转滑台的特长、使用方法等介绍请点击
此处。注意事项
■滑台使用环境
使用环境:10~50℃,20~70%RH(非结露)
推荐使用环境:22±5℃,20~70%RH(非结露)
请避免在如下环境中使用滑台产品
■关于滑台的保养
基于润滑脂的种类,以及使用环境的不同,并没有统一的定期保养标准。根据驱动条件以及导轨种类的不同,请务必保证每月1次的频率进行润滑脂的确认。
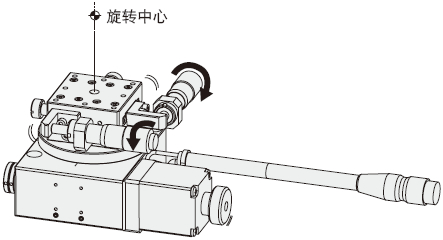
■关于旋转中心的对齐方法
将旋转滑台与配对装置和工件进行组装时,尽可能对齐各中心轴,从而发挥滑台所具有的性能。
建议按照以下方法对齐中心轴后使用。
①在转动旋转滑台的同时,用千分表对偏心量最小的位置进行分度,固定滑台或工件。
②与手动XY轴滑台组合,可轻松进行中心轴的微调。
滑台主体未设置可作为安装基准的平面。
使用环境:10~50℃,20~70%RH(非结露)
推荐使用环境:22±5℃,20~70%RH(非结露)
请避免在如下环境中使用滑台产品
| ①粉尘环境(尤其是金属粉末) ③临近火源 ⑤飞溅水,油的环境 ⑦有机溶液,盐分较多的环境 | ②有阳光直射,热辐射的环境 ④有腐蚀性气体,可燃性气体的环境 ⑥有传到强震动与冲击的环境 |
■关于滑台的保养
基于润滑脂的种类,以及使用环境的不同,并没有统一的定期保养标准。根据驱动条件以及导轨种类的不同,请务必保证每月1次的频率进行润滑脂的确认。
■关于旋转中心的对齐方法
将旋转滑台与配对装置和工件进行组装时,尽可能对齐各中心轴,从而发挥滑台所具有的性能。
建议按照以下方法对齐中心轴后使用。
①在转动旋转滑台的同时,用千分表对偏心量最小的位置进行分度,固定滑台或工件。
②与手动XY轴滑台组合,可轻松进行中心轴的微调。
滑台主体未设置可作为安装基准的平面。
使用案例
米思米自动滑台是研究开发、光学实验、电子部品等的检查、显微镜下的位置调整等适合亚微米的定位的「高精度定位滑台」和部品组装及搬送用途等用到的「经济型定位滑台」的展开。在阵容丰富的米思米自动滑台中更能找到适合客户规格需求的滑台。其根据运动方向,可分为直线运动、水平Z轴、测角仪、旋转4个运动方向的定位滑台。并且可根据客户自己的需求自由组合使其定位范围更加的广泛。
应用行业
| 电子/家电 | 汽车 | 医疗 | ||
 |  |  | ||
| 智能手机 | 半导体 | 锂电池 | ||
 |  |  |
经济型类似产品
■规格表
■通用规格
■电气规格

附件:
RMBG40C:SCB3-25 3个
RMBG60C:SCB4-25 3个
尺寸图

详细尺寸请根据CAD数据确认。
规格表
 | 请按照选型步骤 ~ ~ 选择型式和参数后进行订购。 选择型式和参数后进行订购。 | |||
型式(Type· No.) No.) | - | 电缆 | ||
| RMBG40C | - | N | ||
| 型式 | 电缆 | 机械规格 | 精度规格 | ||||
| Type | No. | 滑台面 (mm) | 移动量 | 自重 (kg) | 重复定位精度 | 力矩刚性 (″/N·cm) | |
| RMBG | 40C | N(无) 电缆另售。 请参阅 P.1739MSCB□选择。 | φ40 | ±8.5° | 0.4 | ±0.003°以内 | 0.52 |
| 60C | φ60 | ±5.5° | 0.62 | 0.25 | |||
■通用规格
| No. | 40C | 60C | |
| 进给丝杠 | 滚珠丝杠Φ6,导程1 | ||
| 导轨 | 组合向心球轴承 | ||
| 分辨率(脉冲) | ≈0.0068°(Full) | ≈0.0043°(Full) | |
| MAX速度 | 101.5°/sec[15khz] | 63.8°/sec[15khz] | |
| 重复定位精度 | ±0.003°以内 | ||
| 耐负载 | 39.2N | 58.8N | |
| 空转 | 0.003° | ||
| 背隙 | 0.01° | ||
| 平行度 | 50μm以内 | ||
■电气规格
| 马达 | 类型 | 5相步进马达 0.75A/相 (东方马达(株)) |
| 型式 | C005C-90215P | |
| 步进角 | 0.72° | |
| 连接器 | 型式 | HR10A-10J-12P(73) 广濑电机(株) |
| 接收侧连接器 | HR10A-10P-12S(73) 广濑电机(株) | |
| 传感器 | 限位传感器 | 有 |
| 原点传感器 (ORG1) | 无 | |
| 开口原点传感器 (ORG2) | 无 | |
| 型式 | 微型光传感器:PM-R25 松下元器件SUNX(株) | |
| 电源电压 | DC5~24V ±5% | |
| 消耗电流 | 合计60mA以下 | |
| 控制输出 | NPN开路集电极输出DC30V以下 10mA以下 | |
| 输出逻辑 | 检测(遮光)时:输出晶体管OFF(非导通) |

材质规格
| Type | 材质 | 表面处理 | 行程(θ角度) (deg) | 耐负载(N) | 重复定位精度 |
| RMBG | 铝合金 | 黑色阳极氧化处理 | ±5.5°~±8.5° | 39.2~58.8 | ±0.003°以内 |
附件:RMBG40C:SCB3-25 3个
RMBG60C:SCB4-25 3个
关于此商品的常见问题 (FAQ)
购买米思米自动滑台后,是否就可以直接使用?实际驱动还需要哪些附件配合使用吗?
客户除了购买米思米自动滑台本体之外,需要再购买驱动器和电缆(带刹车型马达的自动滑台除外)。另外,客户自行得准备24V电源及控制单元(如PLC定位组件/PC+运动控制卡等)。
为何我购买的自动滑台运行时总是失步?
可能造成滑台马达失步的原因有静负荷过大或动负荷变动过大;起动脉冲频率过高(起步速度过快);加速(减速)时间过短;受外部电磁干扰等,请逐一进行排查确认。
为何TIMING无信号?
TIMING无信号,是因为切换了C/S(步距角切换)。C/S切换必须在TIMING有信号时进行,所以最快的解决办法是电源关,再开后切换C/S。
为何马达自启动运转时的移动速度很缓慢?
这是因为平滑驱动功能的影响。请将平滑驱动功能设定为OFF后再确认。
马达没有励磁,马达的输出轴可以用手转动
可能原因有:马达线或电源线接线错误,请确认驱动器和马达短好电源的连接是否正确;电流调整钮调整错误,电流设定值过小时,马达扭矩会变小而造成运转不稳定,请恢复电流调整钮的出厂值之后再确认;A.W.OFF(励磁电流关)误设为ON,请调整至OFF,然后再确认马达是否有励磁。
什么是分辨率?分辨率的全步进、半步进、微步进是什么意思?
分辨率是指1个脉冲信号的滑台移动量。全步进是指滑台在步进马达1/1标准步进角下的进给运动。半步进是指滑台马达的步进角细分成1/2标准步进角下的进给运动。微步进是指滑台马达的步进角细分成1/N标准步进角下的进给运动(N为正整数1、2、2.5、4、5、8、10、20、25、40、50、80、100、125、200、250)。
常被一起浏览的商品
常被一起购买的商品
相关产品集合页
您还有2项规格未选
高精度 自动旋转 滚珠丝杠型
28个备选型号

重置

| 数量 | 未税单价 (元) | 发货日 |
|---|
网页端、APP、小程序商品浏览记录打通
登录状态下多平台可同步浏览商品
登录状态下多平台可同步浏览商品
1
在电脑浏览器中打开米思米官网并登录
2
在顶部点击【个人中心-商品浏览记录】后即可查看扫码商品
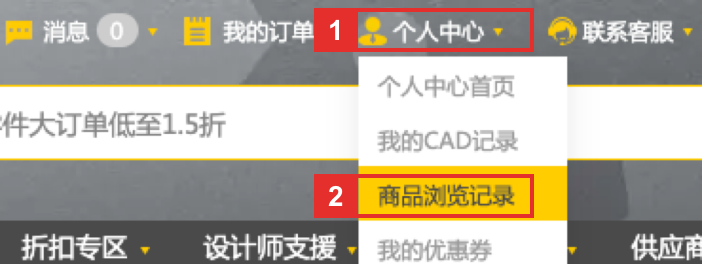
*如果没有出现记录可以尝试刷新浏览器页面。
我知道了
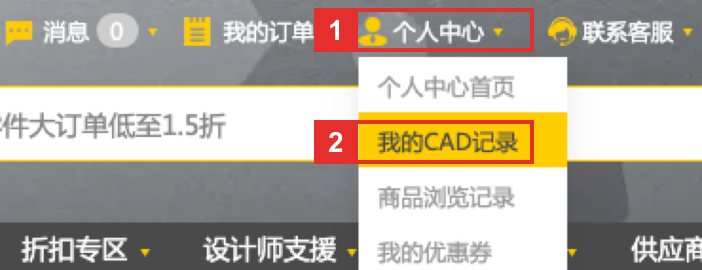
请在米思米官网查看下载的CAD
1
在电脑浏览器中打开米思米官网并登录
2
在顶部点击【个人中心-我的CAD记录】后即可查看本商品