自动滑台 CAVE-X POSITIONER


限时特价
当天发货
可按购买数量进行折扣
自动滑台 CAVE-X POSITIONER
型号:
重选 
型号:
请确定型号
原价:
单价(未税):
购买条件:
发货日:
基本信息
规格表
FAQ
 附件:SUS内六角螺栓M4-10 4个
附件:SUS内六角螺栓M4-10 4个
■移动量
表示滑台面可动作的距离。(各产品页中,在行程中心位置进行图示。)
■耐负载
以滑台面中间可施加的最大负载、以最大速度可驱动的数值。
■单向定位精度
从基准点(行程端)在一个方向上以一定的间隔依次进行定位,在全行程内测量、计算各定位点的实测值(基准点到实际移动的位置)和理论值(指令的实际应移动的位置)之间的差,将其最大差定义为单方向定位精度。
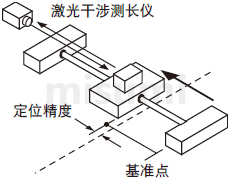
■直线度
从基准点(行程端)在一个方向上以一定的间隔依次进行定位,在整个行程内测量各定位点的垂直、水平方向的直线偏差,将距离该代表直线的最大差值定义为直线度。
(*1)还可以选择4m、6m的电缆。
上表粉色背景中所需产品需要客户自备。
上表为使用PLC控制时的构成示例之一。其他构成示例请点击  此处。
此处。
产品概述
米思米ZCV系列自动滑台的本体采用淬火不锈钢(相当于SUS440C),进行无电解镀镍处理,不仅实现了高刚性,还有很强的防锈性能。导向方式上采用一体式直线滚珠导轨,实现了高精度。
产品特点
特点1: 低价格。采用独特的生产方式,大幅降低了成本。
特点2: 省空间。宽幅采用小型化,长度也采用省空间型。
特点3: 高精度。在主体结构上直接加工导轨,上下面的平行度高。
特点4: 高刚性。上板和下板上直接加工双圆弧槽滚珠导轨,和钢珠四点接触,实现高刚性。
特点2: 省空间。宽幅采用小型化,长度也采用省空间型。
特点3: 高精度。在主体结构上直接加工导轨,上下面的平行度高。
特点4: 高刚性。上板和下板上直接加工双圆弧槽滚珠导轨,和钢珠四点接触,实现高刚性。
规格概述
| Type |  材质 材质 |  表面处理 表面处理 | 移动量(mm) | 耐负载(N) | 单轴精度规格(μm) | |
| 单向定位精度 | 直线度 | |||||
| ZCV | 相当于SCM420 | 无电解镀镍 | 20~30 | 29.4 | 5以内 | 3以内 |
 附件:SUS内六角螺栓M4-10 4个
附件:SUS内六角螺栓M4-10 4个■移动量
表示滑台面可动作的距离。(各产品页中,在行程中心位置进行图示。)
■耐负载
以滑台面中间可施加的最大负载、以最大速度可驱动的数值。
■单向定位精度
从基准点(行程端)在一个方向上以一定的间隔依次进行定位,在全行程内测量、计算各定位点的实测值(基准点到实际移动的位置)和理论值(指令的实际应移动的位置)之间的差,将其最大差定义为单方向定位精度。

■直线度
从基准点(行程端)在一个方向上以一定的间隔依次进行定位,在整个行程内测量各定位点的垂直、水平方向的直线偏差,将距离该代表直线的最大差值定义为直线度。
使用方法
滑台马达为C・D・E场合,需要配合DC24V驱动器(MSDR24-MS)、驱动器用电缆(MSDR24-CB)、滑台用电缆(如MSCB4B),以及客户自备的24V电源、上位机(PLC或运动控制卡)使用,其各个产品之间的连接示例如下图所示。
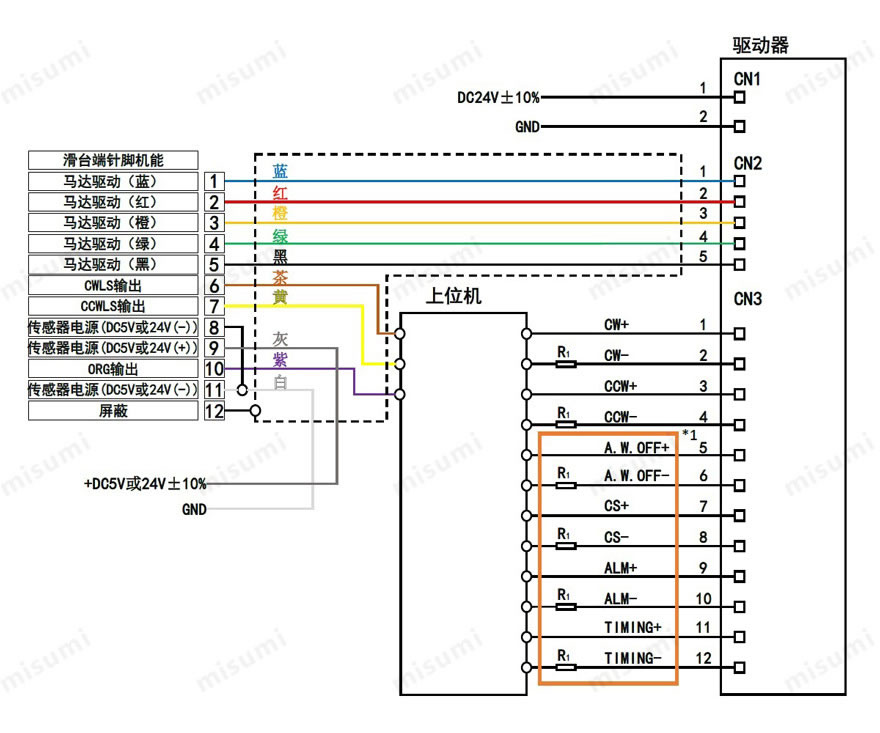
*1驱动器CN3引脚,只需要连接1-4,5-12可以不用连接便可正常使用。用。
上位机的针脚定义请咨询贵司使用的上位机品牌供货商。
上位机输出电压请设置为5V。超过5V时,需要串联一个电阻R1, 将电流降低到7~20mA以下 ,避免烧毁驱动器。
使用驱动器引脚11和12时,有信号输出。若输出电压超过DC24V,请串联一个电阻,使其电流降低至10mA以下,防止烧毁驱动器。
滑台传感器电源的具体电压规格烦请参考具体滑台商品说明【电气规格】参数。

*1驱动器CN3引脚,只需要连接1-4,5-12可以不用连接便可正常使用。用。
上位机的针脚定义请咨询贵司使用的上位机品牌供货商。上位机输出电压请设置为5V。超过5V时,需要串联一个电阻R1, 将电流降低到7~20mA以下 ,避免烧毁驱动器。使用驱动器引脚11和12时,有信号输出。若输出电压超过DC24V,请串联一个电阻,使其电流降低至10mA以下,防止烧毁驱动器。滑台传感器电源的具体电压规格烦请参考具体滑台商品说明【电气规格】参数。相关产品
| 分类1 | 分类2 | 型式(例) | 数量 | 备注 | 页码 | |
| 自动滑台本体 | 自动X轴滑台 | XMSG413- LA5-C-N |  | 1 | 自动X轴直线滚珠导轨型滑台 | P.1713 |
| 控制部件 | 驱动器 | MSDR24-MS |  | 1 | 微步控制驱动器 输入电源:DC24V | P.1738 |
| DC24V电源 | - | - | 请客户自备 | |||
| 控制设备 (PLC定位组件/PC+运动控制卡等) | - | - | 请客户自备 | |||
| 电缆 | 自动滑台本体⇔驱动器 (一端散线) | MSCB2B |  | 1 | 一端散线的2m常规电缆 (*1) | P.1739 |
| 驱动器用电缆(线束) | MSDR24-CB |  | 1 | 驱动器用连接器已进行电缆配线,无需连接器的压接作业。 | P.1738 | |
上表粉色背景中所需产品需要客户自备。上表为使用PLC控制时的构成示例之一。其他构成示例请点击  此处。
此处。相关文件
■自动滑台相关参数介绍请点击 自动滑台技术资料。
■控制器MSDR24-MS的使用说明书请点击 5相步进马达驱动器使用说明书。
■XMSG系列自动滑台电气规格、外形尺寸、针排列介绍请点击 直线滚珠导轨型滑台概要。
自动滑台技术资料。■控制器MSDR24-MS的使用说明书请点击
5相步进马达驱动器使用说明书。■XMSG系列自动滑台电气规格、外形尺寸、针排列介绍请点击
直线滚珠导轨型滑台概要。注意事项
■滑台使用环境
使用环境:10~50℃,20~70%RH(非结露)
推荐使用环境:22±5℃,20~70%RH(非结露)
请避免在如下环境中使用滑台产品
■关于滑台的保养
基于润滑脂的种类,以及使用环境的不同,并没有统一的定期保养标准。根据驱动条件以及导轨种类的不同,请务必保证每月1次的频率进行润滑脂的确认。
使用环境:10~50℃,20~70%RH(非结露)
推荐使用环境:22±5℃,20~70%RH(非结露)
请避免在如下环境中使用滑台产品
■关于滑台的保养
基于润滑脂的种类,以及使用环境的不同,并没有统一的定期保养标准。根据驱动条件以及导轨种类的不同,请务必保证每月1次的频率进行润滑脂的确认。
使用案例
米思米自动滑台是用于研究开发光学实验、电子部品等的检查、显微镜下的位置调整等。在阵容丰富的米思米自动滑台中能找到适合客户规格需求的滑台,根据运动方向,可分为直线运动、水平Z轴、测角仪、旋转4个运动方向的定位滑台,并且可根据客户自己的需求自由组合使其定位范围更加的广泛。
应用行业
| 电子/家电 | 汽车 | 医疗 | ||
 |  |  | ||
| 智能手机 | 半导体 | 锂电池 | ||
 |  |  |

■规格表
*1选择马达MA、PA时驱动器是配套使用的。电缆可以各自选择对应的M和P,但不能选择N(无电缆)。
*2选择马达C时的值。
*3单轴(水平放置)的精度规格。
■马达、电缆对应表
C,F,G用电缆请参照MSCB□
■最大速度
因客户的使用条件不同,速度、定位时间有所差异,敬请注意。
仅为本公司规定的参考值,并不能保证动作。
■通用规格
单轴平放的规格。
*4 指一个脉冲信号对应的滑台移动量。
*5 括号内为选择马达G(高分辨率)时的数值。
*6 耐负载为Z轴的值。
■电气规格
传感器EE-SX4134已停止生产,从2018年11月起更新为EE-SX4320。
■时序图
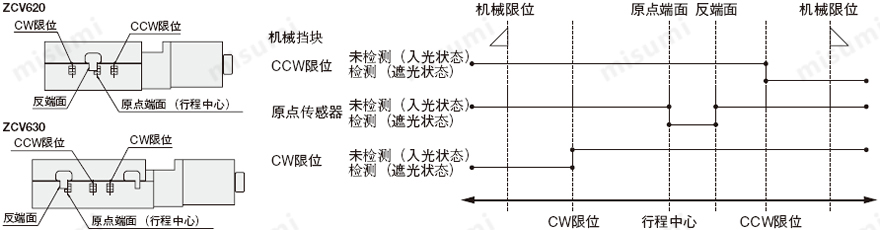
原点复位是指使用MSCTL102系列控制器进行原点复位Type4时。
坐标为设计值。可能会与实际尺寸有±0.5mm左右的误差。
■建议原点复位方法
尺寸图

规格表
 型号 型号 | - |  马达 马达 | - |  电缆 电缆 |
| ZCV620 | - | C | - | N |
■规格表
| 型号 | 马达 | 电缆 | 机械规格 | 单轴精度规格 | 精度规格 | |||||
| 滑台面 (mm) | 移动量 (mm) | 自重*2 (kg) | 单向 定位精度 | 运动的 直线度 | 运动的垂直度 (全行程) | 上下摆动 | 左右摇动 | |||
| ZCV620 | C(标准) F(高扭矩) G(高分辨率) MA*1(带制动器) PA*2(α步进) | N(无电缆、另售) M(带制动器) P(α步进用) 马达与电缆的组合请参考下表。 | 60×60 | 20 | 1.08 | 5μm以内 | 3μm | 10μm以内 | 20″以内 | 15″以内 |
| ZCV630 | 60×70 | 30 | 1.18 | 5μm以内 | 3μm | 15μm以内 | 20″以内 | 15″以内 | ||
*2选择马达C时的值。
*3单轴(水平放置)的精度规格。
■马达、电缆对应表
| 马达 | 电缆 |
| C,F,G | N(无) |
| MA | M |
| PA | P |
C,F,G用电缆请参照MSCB□■最大速度
| 马达选择 | (mm/sec) |
| C | 20 |
| F | 30 |
| G | 20 |
| MA | 25 |
| PA | 40 |
因客户的使用条件不同,速度、定位时间有所差异,敬请注意。仅为本公司规定的参考值,并不能保证动作。
■通用规格
| 进给丝杠 | 滚珠丝杠φ8、导程1 | |||||||||||||||
| 导轨 | 直线滚珠导轨 | |||||||||||||||
| 分辨率*4 | Full | 2μm/脉冲(1μm/脉冲)*5 | ||||||||||||||
| Half | 1μm/脉冲(0.5μm/脉冲)*5 | |||||||||||||||
| 微步(1/20分割时) | 0.1μm(0.05μm) | |||||||||||||||
| 重复定位精度 | ±0.5μm以内 | |||||||||||||||
| 耐负载*6 | 29.4N | |||||||||||||||
| 无效运动 | 1μm以内 | |||||||||||||||
| 背隙 | 1μm以内 | |||||||||||||||
| 直线度 | 3μm以内 | |||||||||||||||
| 平行度 | 15μm以内 | |||||||||||||||
| 运动平行度 | 10μm以内 | |||||||||||||||
单轴平放的规格。*4 指一个脉冲信号对应的滑台移动量。
*5 括号内为选择马达G(高分辨率)时的数值。
*6 耐负载为Z轴的值。
■电气规格
| 马达 | C | F | G | MA | PA | ||||||||||
| 标准 | 高扭矩 | 高分辨率 | 带制动器 | 无失步 | |||||||||||
| 马达 | 类型 | 5相步进马达 0.75A/相(东方马达(株)) | α步进马达 | ||||||||||||
| 步进角 | 0.72° | 0.72° | 0.36° | 0.72° | 0.36°(设定1000P/R时) | ||||||||||
| 连接器 | 接收侧适用连接器 | HR10A-10P-12S(73)(广濑电机(株)) | 马达侧:5557-06P-210 电磁制动器侧:5557-02P-210(MOLEX) | 43020-1000(MOLEX) | |||||||||||
| 传感器 | 限位传感器 | 有 | |||||||||||||
| 原点传感器 | 微型光电传感器 EE-SX4320(欧姆龙(株)) | ||||||||||||||
| 接近原点传感器 | - | ||||||||||||||
| 电源电压 | DC5~24V ±5% | ||||||||||||||
| 消耗电流 | 合计60mA以下 | ||||||||||||||
| 控制输出 | NPN开路集电极输出 DC30V以下 10mA以下 残留电压0.3V以下(负载电流2mA时) | ||||||||||||||
| 输出逻辑 | 检测(遮光)时:输出晶体管OFF(非导通) | ||||||||||||||
传感器EE-SX4134已停止生产,从2018年11月起更新为EE-SX4320。■时序图



 CCW方向
CCW方向| 坐标基准 | 机械限位 | CW限位 | 原点端面 行程中心 | 反端面 | CCW限位 | 机械限位 | |
| ZCV620 | 原点复位 | 11.5 | 10.5 | 0 | 5 | 10.5 | 11.5 |
| ZCV630 | 原点复位 | 16.5 | 15.5 | 0 | 5 | 15.5 | 16.5 |
原点复位是指使用MSCTL102系列控制器进行原点复位Type4时。坐标为设计值。可能会与实际尺寸有±0.5mm左右的误差。■建议原点复位方法
| Type3 | 向CCW方向进行检测,执行ORG信号的CCW侧边的检测工序。 |
| Type4 | 向CW方向进行检测,执行ORG信号的CW侧边的检测工序。 |
| Type9 | Type3执行完毕后,执行TIMING信号的CCW侧边的检测工序。 |
| Type10 | Type4执行完毕后,执行TIMING信号的CW侧边的检测工序。 |
关于此商品的常见问题 (FAQ)
购买米思米自动滑台后,是否就可以直接使用?实际驱动还需要哪些附件配合使用吗?
客户除了购买米思米自动滑台本体之外,需要再购买驱动器和电缆(带刹车型马达的自动滑台除外)。另外,客户自行得准备24V电源及控制单元(如PLC定位组件/PC+运动控制卡等)。
为何我购买的自动滑台运行时总是失步?
可能造成滑台马达失步的原因有静负荷过大或动负荷变动过大;起动脉冲频率过高(起步速度过快);加速(减速)时间过短;受外部电磁干扰等,请逐一进行排查确认。
为何TIMING无信号?
TIMING无信号,是因为切换了C/S(步距角切换)。C/S切换必须在TIMING有信号时进行,所以最快的解决办法是电源关,再开后切换C/S。
为何马达自启动运转时的移动速度很缓慢?
这是因为平滑驱动功能的影响。请将平滑驱动功能设定为OFF后再确认。
马达没有励磁,马达的输出轴可以用手转动
可能原因有:马达线或电源线接线错误,请确认驱动器和马达短好电源的连接是否正确;电流调整钮调整错误,电流设定值过小时,马达扭矩会变小而造成运转不稳定,请恢复电流调整钮的出厂值之后再确认;A.W.OFF(励磁电流关)误设为ON,请调整至OFF,然后再确认马达是否有励磁。
什么是分辨率?分辨率的全步进、半步进、微步进是什么意思?
分辨率是指1个脉冲信号的滑台移动量。全步进是指滑台在步进马达1/1标准步进角下的进给运动。半步进是指滑台马达的步进角细分成1/2标准步进角下的进给运动。微步进是指滑台马达的步进角细分成1/N标准步进角下的进给运动(N为正整数1、2、2.5、4、5、8、10、20、25、40、50、80、100、125、200、250)。
常被一起浏览的商品
常被一起购买的商品
相关产品集合页
单价(未税):
数量:



总价(含税):
总价(未税):
总价(未税):
分享
客服
产品目录
加入购物车
| 数量 | 未税单价 (元) | 发货日 |
|---|