单轴机器人RSH1 滑块型






限时特价
当天发货
可按购买数量进行折扣
单轴机器人RSH1 滑块型
型号:
重选 
型号:
请确定型号
原价:
单价(未税):
购买条件:
发货日:
基本信息
规格表
FAQ
*1:机械挡块在两端的停止位置。
*2:安装时,主体内部不能使用垫圈等。
*3:机器人主体电缆的最小弯曲半径为R50。
*4:使用直径10定位孔安装主体时,定位销进入主体内部的深度必须低于10mm。
产品概述
米思米RS是特制电机内置的机器人本体、控制器、线缆配套组成的单轴机器人,又称电缸。
为推动中国工厂产线自动化,我们提供滑台型、轴杆型、皮带驱动型、洁净规格等品种,方便您根据使用环境进行选择。

为推动中国工厂产线自动化,我们提供滑台型、轴杆型、皮带驱动型、洁净规格等品种,方便您根据使用环境进行选择。

产品特点
| 类型 | 产品图 | 单轴机器人RS 特点 | 说明 | 图示 |
| 小型低成本机器人 RS1/2/3 系列 |  | 1.旋转编码器 | 采用旋转编码器检测马达的旋转角度与普通的光学式编码器相比,可靠性更高。 |  |
| 2.4列2点接触式单圆弧形沟槽导轨 | 自动调节能力强,即使机器人安装面的刚性精度较低,也能顺畅运行。 由于滑差量小,即使承受重载,也能长期维持运行。 |  | ||
| 3.层压型接触刮板及特有润滑装置 | 刮板采用多层叠加接触式构造,能多次清除附在轴杆上的细小异物,防止杂物侵入主体内部。 内置润滑装置,可长期免维护。 |  |
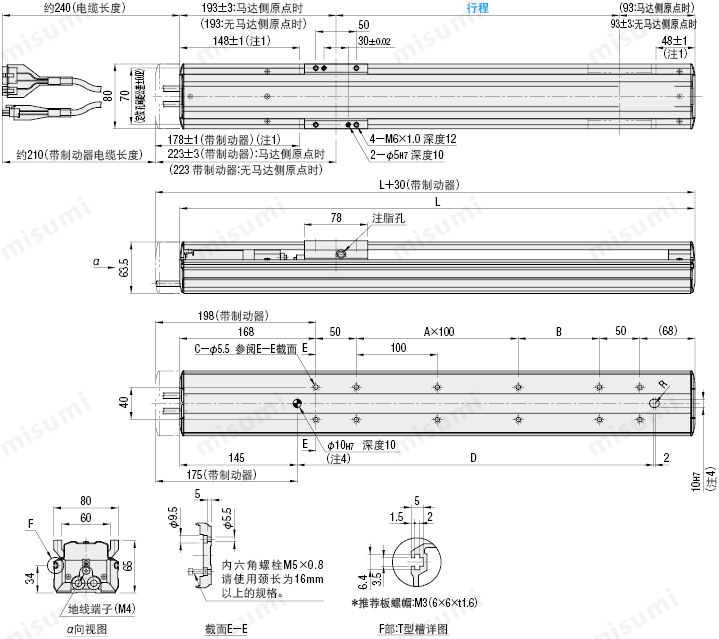
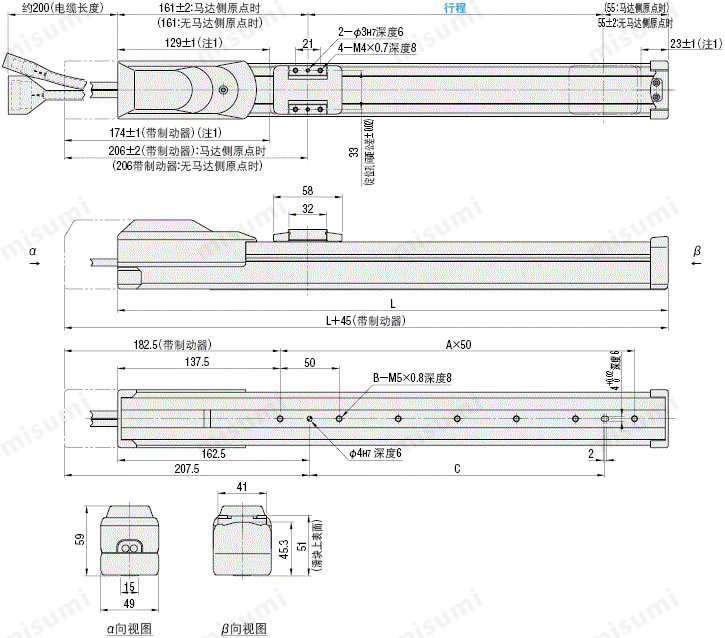
尺寸图

*1:机械挡块在两端的停止位置。
*2:安装时,主体内部不能使用垫圈等。
*3:机器人主体电缆的最小弯曲半径为R50。
*4:使用直径10定位孔安装主体时,定位销进入主体内部的深度必须低于10mm。
规格概述
■机器人材质 表面处理
■附件
■普通规格
■基本规格
■规格表
■规格
*1:垂直使用时请选择带制动器的产品。(不能选择导程为20的带制动器产品)
*2:控制器根据各自的规格设定参数后出厂。另外,数据保存用电池并不符合RoHS指令。
*3:本机型必需噪音滤波器。客户另行订购时,请选择“无”。
另外,请务必在噪音滤波器的一次侧设置浪涌吸收器。详情请参阅使用说明书。
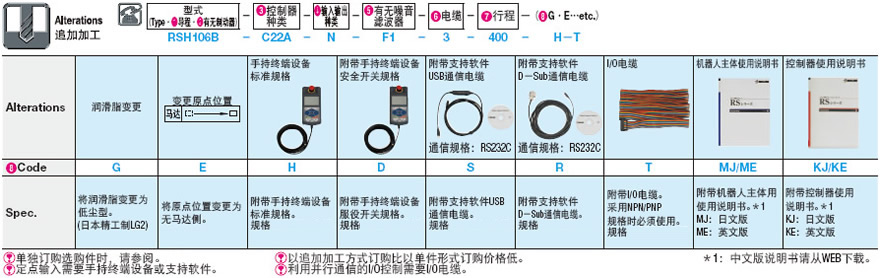
■追加工
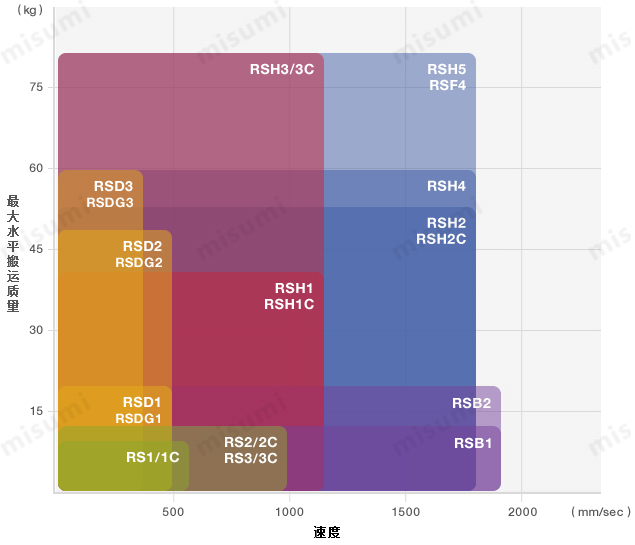
■RS水平搬运质量-速度
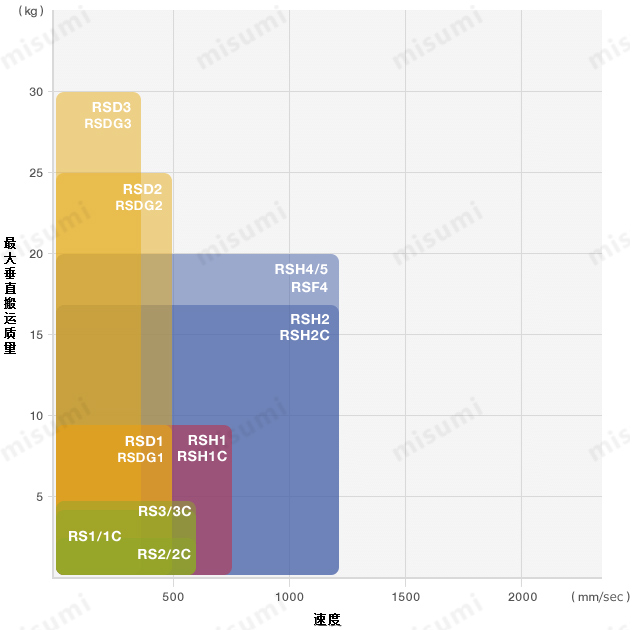
■RS垂直搬运质量-速度
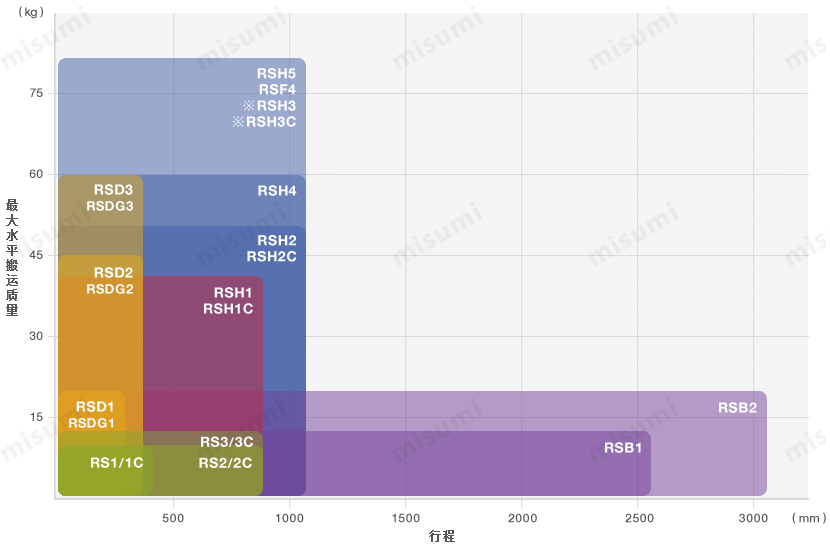
■RS水平搬运质量—行程
 控制器规格 循环时间线图 请参考
控制器规格 循环时间线图 请参考 这里
这里
| 构成零件 | 导轨 | 滑块 | 侧盖 | 底架 |
 材质 材质 | 铁 | 铝合金 | 铝合金 | 铝合金 |
 表面处理 表面处理 | - | 阳极氧化处理 | 阳极氧化处理 | 阳极氧化处理 |
■附件
 附件 附件 | 控制器输入、输出规格 | ||
| NPN,PNP | CC-Link | DeviceNet | |
| 使用说明CD-ROM、电源连接器、虚拟连接器 | |||
| - | CC-Link接头 | DeviceNet连接器 | |
■普通规格
| 滚珠丝杆 | 马达 | 位置检测器 | 使用环境 |
| 直径 12 (C10压扎) | AC伺服马达 100W | 旋转编码器(增量型) | 0~40摄氏度 35%~85%RH(无结露) |
■基本规格
| Type | 导程 (mm) | 重复定位精度(mm) | 最大传送物重量 | 最大推力(N) | 行程(mm) | 最高速度(mm/sec) | 额定行走寿命 | 控制器输入电源 | 最大定位点数 | |
| 水平(kg) | 垂直(kg) | |||||||||
| RSH1 | 06 | ±0.02 | 40 | 8 | 283 | 50~800 (以50为单位) | 360~180 | 10,000km以上 | 单相AC 100~115V 200~230V ±10% | 255分 |
| 12 | 20 | 4 | 141 | 720~360 | ||||||
| 20 | 12 | - | 84 | 1200~600 | ||||||
■规格表
| 型式 | - | 控制器种类 | - | 输入输出种类 | - | 有无噪音滤波器 | - | 电缆长度 | - | 行程 |
| RSH106B | - | C22A | - | N | - | F1 | - | 3 | - | 400 |
■规格
| 型式 | 选择 | |||||||||||||
| Type | 导程(mm) | 有无制动器(*1) | 控制器种类(*2) | 输入输出种类 | 有无噪音滤波器(*3) | 电缆 | 行程(mm) | |||||||
| RSH1 | 06 | 无:标注“无” 有:B | NPN:N PNP:P CC-Link:C DeviceNet:D | 无:F0 有:F1 规格 | 150~800 (指定单位50mm) | |||||||||
| 12 | 规格 电源 | 绝对值型规格 (带数据保存用电池) | 增量型规格 | 标准 | 耐弯曲型 | |||||||||
| 3.5m:3 | 3.5m:R3 | |||||||||||||
| AC100~115V | C21A | C21B | 5m:5 | 5m:R5 | ||||||||||
| AC200~230V | C22A | C22B | 10m:10 | 10m:R10 | ||||||||||
| 20 | ||||||||||||||
*2:控制器根据各自的规格设定参数后出厂。另外,数据保存用电池并不符合RoHS指令。
*3:本机型必需噪音滤波器。客户另行订购时,请选择“无”。
另外,请务必在噪音滤波器的一次侧设置浪涌吸收器。详情请参阅使用说明书。
■追加工

■RS水平搬运质量-速度

■RS垂直搬运质量-速度

■RS水平搬运质量—行程

 控制器规格 循环时间线图 请参考
控制器规格 循环时间线图 请参考 这里
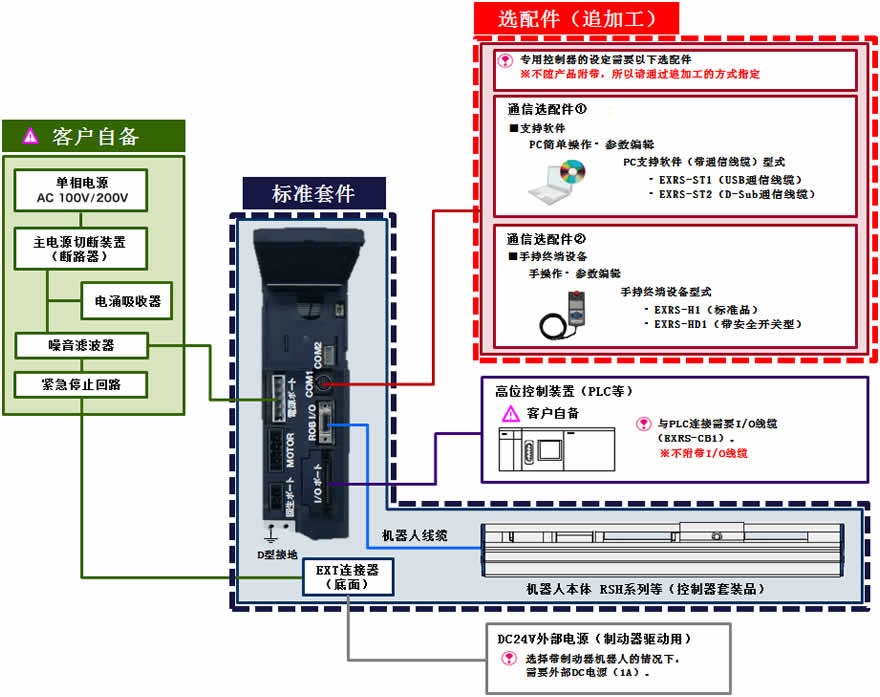
这里使用方法
■系统组成
| 安装定位方法 | 型号 | 螺栓 | 紧固扭矩 |
 | RSH1 RSH2 RSH3 | 内六角M5螺栓 强度:8.8T 长度:20mm以上 | 60kgf•cm ~ 90kgf•cm |
| 系统组成 | 组成部件(案例) | ||
 | 手持终端设备(选配件) EXRS-H1 EXRS-HD1 | ||
| 支持软件(选配件) EXRS-ST1 EXRS-ST2 | |||
| 高位控制装置(PLC等) 客户自备 | |||
| RSH106B-C22A-N-F1-3-400 | |||
使用案例

注意事项
■单轴机器人使用环境
使用环境: 0 ~40℃
允许环境相对湿度:35 ~85% RH 以下 ( 无结露)
■为了保证控制器正常动作,请避免在下列环境中使用
①含有硫酸、盐酸等腐蚀性气体和可燃性气体、易燃性液体的环境
②粉尘、灰尘较多的场所
③其他机器的切屑和油、水会溅到的场所
④有较大震动的场所
⑤会产生电磁干扰、静电干扰的场所
⑥日光直射场所
■安装机器人所使用的底座必须符合下列条件。
初次使用者,请务必阅览单轴机器人使用说明书。
①安装底座在机器人动作中会受到较大的反作用力,因此应使用具有足够刚性和稳定性的物体。
②底座的机器人安装面的平面度和水平度应精度在±0.05/500mm以内。
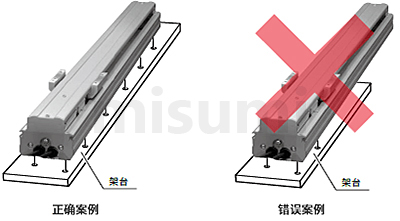
③请使用指定数量的螺栓以及有足够大小安装机器人的底座。在底座上安装机器人的螺栓不得低于规定数量,避免有右下图所示只固定一半。
使用环境: 0 ~40℃
允许环境相对湿度:35 ~85% RH 以下 ( 无结露)
■为了保证控制器正常动作,请避免在下列环境中使用
①含有硫酸、盐酸等腐蚀性气体和可燃性气体、易燃性液体的环境
②粉尘、灰尘较多的场所
③其他机器的切屑和油、水会溅到的场所
④有较大震动的场所
⑤会产生电磁干扰、静电干扰的场所
⑥日光直射场所
■安装机器人所使用的底座必须符合下列条件。
初次使用者,请务必阅览单轴机器人使用说明书。
①安装底座在机器人动作中会受到较大的反作用力,因此应使用具有足够刚性和稳定性的物体。
②底座的机器人安装面的平面度和水平度应精度在±0.05/500mm以内。
③请使用指定数量的螺栓以及有足够大小安装机器人的底座。在底座上安装机器人的螺栓不得低于规定数量,避免有右下图所示只固定一半。

计算软件

相关产品
| 单轴驱动器 LX26 | 单轴驱动器 LXH30 | 经济型 单轴驱动器 LS12 | ||
 |  |  | ||
| 代表型号:LX2610-B1-A2640-400 | 代表型号:LXH3010C-B1-A3038-600 | 代表型号:LS1205-60-A40 | ||
| 优点:高精度 省空间 高性价比 | 优点:高刚性 长行程 适合重物搬送 | 优点:低成本 中精度定位传送 |
应用业界
| 电子/家电 | 汽车 | 医疗 | ||
 |  |  | ||
| 智能手机 | 半导体 | 锂电池 | ||
 |  |  |
*1:机械挡块在两端的停止位置。
*2:安装时,主体内部不能使用垫圈等。
*3:机器人主体电缆的最小弯曲半径为R50。
*4:使用直径10定位孔安装主体时,定位销进入主体内部的深度必须低于10mm。
■基本规格
(注)最高速度因行程而异。请参阅最高速度表。
■尺寸、重量
■规格
*1:垂直使用时请选择带制动器的产品。(不能选择导程为20的带制动器产品)
*2:控制器根据各自的规格设定参数后出厂。另外,数据保存用电池并不符合RoHS指令。
*3:本机型必需噪音滤波器。客户另行订购时,请选择“无”。
另外,请务必在噪音滤波器的一次侧设置浪涌吸收器。详情请参阅使用说明书。
■最高速度(mm/sec)
行程超过600mm时,根据动作区域的不同,可能产生滚珠丝杠共振现象(危险速度)。
请参考上表所示的最高速度,降低动作速度进行调节。
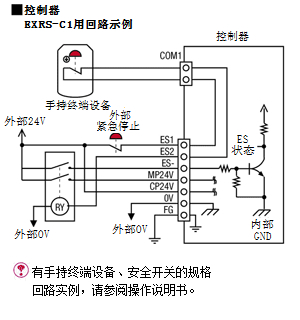
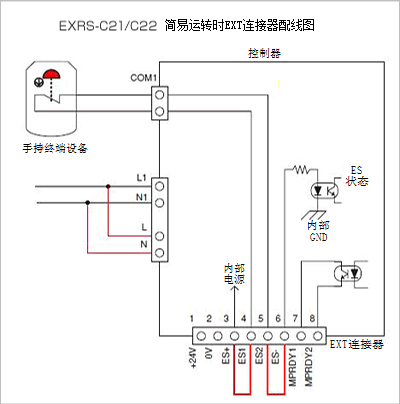
■EXRS-C21/C22 控制器
本控制器无内置紧急停止回路。请根据法令,根据您需要的安全类型构筑相对应的外部紧急停止回路。
电涌吸收器请务必设置在噪音滤波器的一侧。EXRS-C2控制器上必须设置噪音滤波器。
■逻辑图
■紧急停止电路示例 EXRS-C21/C22
EXT 连接器中,包含通过外部安全电路使机器人安全停止的信号,以及给带制动器的机器人的制动器供给电源用的端子。
为了能够满足客户对于安全等级的不同要求,本控制器取消了内部的主电源断电电路。
请务必在外部构建主电源断电电路与紧急停止电路。
请务必在电磁接触器的线圈部安装浪涌吸收单元。
■信号详细说明
机械制动器用电源输入(+24V、0V)
给机械制动器供电用的输入。
使用带制动器的机器人时,请对此端子输入DC24V。不使用制动器时,则不必连接。
制动器电源:DC24V±10% 300mA
机械制动器用电源输入
■紧急停止输入用内部电源(ES+)、紧急停止准备信号(ES-)
用于想要通过外部安全电路( 例如:防护栏、手动开关等) 使机器人紧急停止时。
断开ES+ 与ES- 之间的继电器触点(OFF) 时,控制器将进入紧急停止状态,同时变为伺服断电状态。
将EXT 连接器的ES+ 与ES- 直接短路时,将无法从外部进行紧急停止,包括手持编程器的紧急停止按钮也会无法使用,非常危险。
请务必使用ES+ 与ES- 进行连接,以便外部安全电路能够起作用。
■紧急停止触点1、2 (ES1、ES2)
使用不带启动开关的手持编程器时,ES1、ES2 是手持编程器紧急停止按钮的触点输出。
使用带启动开关的手持编程器时,ES1 连接手持编程器的安全接口的14 号针脚,ES2 连接15 号针脚。
请分别使用ES1、ES2 构建外部安全电路。
负荷:DC24V 300mA MAX
若将附带的仿真连接器与COM1 相连接,则ES1 与ES2 将短路。
紧急停止触点1、2 (ES1、ES2)
■主电源输入准备就绪输出触点(MPRDY1、MPRDY2)
在可输入主电源的情况下闭合。发生异常警报( 内部原因) 时断开。请作为判断是否开/ 关外部安全电路主电源的条件使用。
负荷:DC24V 300mA MAX
主电源输入准备就绪输出触点(MPRDY1、MPRDY2)
■电源连接器的接线方法
可使用的电线尺寸为1.25 〜 2.5sq (AWG16 〜 12) 以上。请剥除电线的外被后,再进行接线。( 使用AWG12 时,根据电线的外被外径不同,可能有无法接线的情况。)
按照下图所示的任意一种方法将电线的芯线部分插入电源连接器的开口部,并确认电线不会松脱。
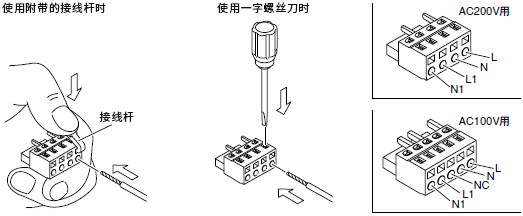
如附带的电源连接器已插在控制器的电源接口上时,请从控制器上取下后,再进行接线。
请在电源接口的1 个电线插入口中插入1 根电线。
插入电线时,请勿使芯线的线须接触其他导体部分。
当电线的插入部分由于某种原因老化时,请重新剥出电线再进行接线。
■接地端子
为了防止万一漏电时发生触电事故或由于噪声造成设备的误动作,请务必进行接地作业。请采用D 型接地( 接地电阻100Ω 以下)。
请使用以下拧紧扭矩对接地端子的螺钉进行拧紧。 推荐拧紧扭矩,0.75N.m
■电源功率与发热量参考基准
电源功率与发热量根据机器人机型有所不同。请将下表作为参考基准探讨电源的准备及控制盘的大小、控制器的配置与冷却方法
■接线用断路器安装
漏电断路器
由于控制器采用PWM 控制驱动马达,高频泄漏电流可能会引起安装在外部的漏电断路器的误动作。
因此,在外部安装漏电断路器时,请注意选择额定灵敏度电流(I n)。( 请在参考漏电断路器厂商资料的基础上,选择适合逆变器使用的漏电断路器使用。)
1. 上述泄漏电流值是采用漏电检测器( 日置马达生产的3283) 在低通滤波器ON (100Hz) 状态下测得的数值。
2. 安装多台控制器时,请将每台的泄漏电流相加。
3. 请务必进行接地。
4. 根据电源线的安装状况,电源线与FG 之间的杂散电容会发生变化,从而导致泄漏电流也发生变化。
■电路保护器
接通控制器电源或马达起动时,会产生额定电流几倍到10 几倍的冲击电流。在外部安装电路保护器时,请注意该动作特性。( 请在参考电路保护器厂商资料的基础上选择。)
■浪涌吸收器安装
为了保护设备不受因雷击产生的浪涌噪声的影响,请务必在外部安装浪涌吸收器。
■电磁接触器安装
为了能够满足客户对于安全等级的不同要求,本控制器取消了内部的主电源断电电路。
在选择了符合客户所要求安全等级的产品之后,请务必在主电源侧安装电磁接触器,构建主电源断电电路。
■噪声滤波器安装
为了防止受到通过电源线传导的噪声影响,请务必安装噪声滤波器。
■EXRS-C21/C22通用 搭建紧急停止电路用零件示例
以上仅作参考,请结合客户安全规格进行选定。
■米思米单轴机器人 说明手册 请参考这里
尺寸图

*1:机械挡块在两端的停止位置。
*2:安装时,主体内部不能使用垫圈等。
*3:机器人主体电缆的最小弯曲半径为R50。
*4:使用直径10定位孔安装主体时,定位销进入主体内部的深度必须低于10mm。
规格表
 | 型式 | - | 控制器种类 | - | 输入输出种类 | - | 有无噪音滤波器 | - | 电缆长度 | - | 行程 | |
| RSH106B | - | C22A | - | N | - | F1 | - | 3 | - | 400 |
■基本规格
| Type | 导程 (mm) | 重复定位精度(mm) | 最大传送物重量 | 最大推力(N) | 行程(mm) | 最高速度(mm/sec) | 额定行走寿命 | 控制器输入电源 | 最大定位点数 | |
| 水平(kg) | 垂直(kg) | |||||||||
| RSH1 | 06 | ±0.02 | 40 | 8 | 283 | 50~800 (以50为单位) | 360~180 | 10,000km以上 | 单相AC 100~115V 200~230V ±10% | 255分 |
| 12 | 20 | 4 | 141 | 720~360 | ||||||
| 20 | 12 | - | 84 | 1200~600 | ||||||
■尺寸、重量
| Type | 尺寸、重量 | 行程(mm) | |||||||||||||
| 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | ||
| RSH1 | L(mm) | 436 | 486 | 536 | 586 | 636 | 686 | 736 | 786 | 836 | 886 | 936 | 986 | 1036 | 1086 |
| A | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | |
| B(mm) | 100 | 150 | 100 | 150 | 100 | 150 | 100 | 150 | 100 | 150 | 100 | 150 | 100 | 150 | |
| C | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 | 20 | |
| D(mm) | 240 | 290 | 340 | 390 | 440 | 490 | 540 | 590 | 640 | 690 | 740 | 790 | 840 | 890 | |
| 重量(kg) | 3.6 | 3.9 | 4.2 | 4.4 | 4.7 | 5 | 5.3 | 5.6 | 5.9 | 6.2 | 6.4 | 6.7 | 7 | 7.3 | |
■规格
| 型式 | 选择 | |||||||||||||
| Type | 导程(mm) | 有无制动器(*1) | 控制器种类(*2) | 输入输出种类 | 有无噪音滤波器(*3) | 电缆 | 行程(mm) | |||||||
| RSH1 | 06 | 无:标注“无” 有:B | NPN:N PNP:P CC-Link:C DeviceNet:D | 无:F0 有:F1 规格 | 150~800 (指定单位50mm) | |||||||||
| 12 | 规格 电源 | 绝对值型规格 (带数据保存用电池) | 增量型规格 | 标准 | 耐弯曲型 | |||||||||
| 3.5m:3 | 3.5m:R3 | |||||||||||||
| AC100~115V | C21A | C21B | 5m:5 | 5m:R5 | ||||||||||
| AC200~230V | C22A | C22B | 10m:10 | 10m:R10 | ||||||||||
| 20 | ||||||||||||||
*2:控制器根据各自的规格设定参数后出厂。另外,数据保存用电池并不符合RoHS指令。
*3:本机型必需噪音滤波器。客户另行订购时,请选择“无”。
另外,请务必在噪音滤波器的一次侧设置浪涌吸收器。详情请参阅使用说明书。
■最高速度(mm/sec)
| Type | 导程 (mm) | 行程(mm) | |||||
| 150~550 | 600 | 650 | 700 | 750 | 800 | ||
| RSH1 | 06 | 360 | 324 | 270 | 234 | 216 | 180 |
| 12 | 720 | 648 | 540 | 468 | 432 | 360 | |
| 20 | 1200 | 1080 | 900 | 780 | 720 | 600 | |
行程超过600mm时,根据动作区域的不同,可能产生滚珠丝杠共振现象(危险速度)。请参考上表所示的最高速度,降低动作速度进行调节。
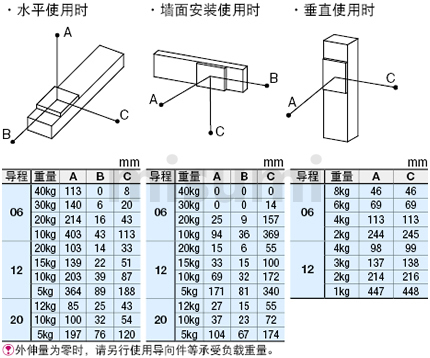
■容许外伸量

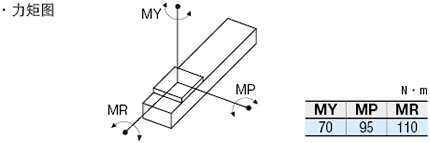
■静态容许力矩

 本控制器无内置紧急停止回路。请根据法令,根据您需要的安全类型构筑相对应的外部紧急停止回路。电涌吸收器请务必设置在噪音滤波器的一侧。EXRS-C2控制器上必须设置噪音滤波器。
本控制器无内置紧急停止回路。请根据法令,根据您需要的安全类型构筑相对应的外部紧急停止回路。电涌吸收器请务必设置在噪音滤波器的一侧。EXRS-C2控制器上必须设置噪音滤波器。■逻辑图

■紧急停止电路示例 EXRS-C21/C22
EXT 连接器中,包含通过外部安全电路使机器人安全停止的信号,以及给带制动器的机器人的制动器供给电源用的端子。
 为了能够满足客户对于安全等级的不同要求,本控制器取消了内部的主电源断电电路。
为了能够满足客户对于安全等级的不同要求,本控制器取消了内部的主电源断电电路。请务必在外部构建主电源断电电路与紧急停止电路。
请务必在电磁接触器的线圈部安装浪涌吸收单元。■电源连接器
使用附带的电源连接器连接电源。
使用附带的电源连接器连接电源。

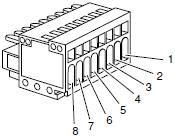
| 针脚编 | 信号名 | 内容 |
| 1 | +24V | 机械制动器用电源输入 |
| 2 | 0V | |
| 3 | ES+ | 紧急停止输入用内部电源 |
| 4 | ES1 | 非常停止接点1 |
| 5 | ES2 | 非常停止接点2 |
| 6 | ES- | 紧急停止准备信号 |
| 7 | MPRDY1 | 主电源输入准备就绪输出触点 |
| 8 | MPRDY2 |
机械制动器用电源输入(+24V、0V)
给机械制动器供电用的输入。
使用带制动器的机器人时,请对此端子输入DC24V。不使用制动器时,则不必连接。
制动器电源:DC24V±10% 300mA
机械制动器用电源输入
| 信号名 | 含义 | 种类 |
| +24~0V | 机械制动器用电源输入 | 输入 |
■紧急停止输入用内部电源(ES+)、紧急停止准备信号(ES-)
用于想要通过外部安全电路( 例如:防护栏、手动开关等) 使机器人紧急停止时。
断开ES+ 与ES- 之间的继电器触点(OFF) 时,控制器将进入紧急停止状态,同时变为伺服断电状态。
| 信号名 | 含义 | 种类 |
| ES+ | 紧急停止输入用内部电源 | 输出 |
| ES- | 紧急停止输入( 紧急停止准备信号) | 输入 |
将EXT 连接器的ES+ 与ES- 直接短路时,将无法从外部进行紧急停止,包括手持编程器的紧急停止按钮也会无法使用,非常危险。请务必使用ES+ 与ES- 进行连接,以便外部安全电路能够起作用。
■紧急停止触点1、2 (ES1、ES2)
使用不带启动开关的手持编程器时,ES1、ES2 是手持编程器紧急停止按钮的触点输出。
使用带启动开关的手持编程器时,ES1 连接手持编程器的安全接口的14 号针脚,ES2 连接15 号针脚。
请分别使用ES1、ES2 构建外部安全电路。
负荷:DC24V 300mA MAX
若将附带的仿真连接器与COM1 相连接,则ES1 与ES2 将短路。
紧急停止触点1、2 (ES1、ES2)
| 信号名 | 含义 | |
| 使用不带启动开关的手持编程器 | 使用带启动开关的手持编程器时 | |
| ES1 | 手持编程器的紧急停止触点输出1 | 与手持编程器的安全接口的14 号针脚相连接 |
| ES2 | 手持编程器的紧急停止触点输出2 | 与手持编程器的安全接口的15 号针脚相连接 |
■主电源输入准备就绪输出触点(MPRDY1、MPRDY2)
在可输入主电源的情况下闭合。发生异常警报( 内部原因) 时断开。请作为判断是否开/ 关外部安全电路主电源的条件使用。
负荷:DC24V 300mA MAX
主电源输入准备就绪输出触点(MPRDY1、MPRDY2)
| 信号名 | 含义 | 种类 | |
| MPRDY1 | 主电源输入准备就绪输出 | 晶体管输入 | 输入 |
| MPRDY2 | 晶体管输出 | 输出 | |
■电源连接器的接线方法
可使用的电线尺寸为1.25 〜 2.5sq (AWG16 〜 12) 以上。请剥除电线的外被后,再进行接线。( 使用AWG12 时,根据电线的外被外径不同,可能有无法接线的情况。)
按照下图所示的任意一种方法将电线的芯线部分插入电源连接器的开口部,并确认电线不会松脱。
 如附带的电源连接器已插在控制器的电源接口上时,请从控制器上取下后,再进行接线。请在电源接口的1 个电线插入口中插入1 根电线。插入电线时,请勿使芯线的线须接触其他导体部分。当电线的插入部分由于某种原因老化时,请重新剥出电线再进行接线。
如附带的电源连接器已插在控制器的电源接口上时,请从控制器上取下后,再进行接线。请在电源接口的1 个电线插入口中插入1 根电线。插入电线时,请勿使芯线的线须接触其他导体部分。当电线的插入部分由于某种原因老化时,请重新剥出电线再进行接线。■接地端子
为了防止万一漏电时发生触电事故或由于噪声造成设备的误动作,请务必进行接地作业。请采用D 型接地( 接地电阻100Ω 以下)。
请使用以下拧紧扭矩对接地端子的螺钉进行拧紧。 推荐拧紧扭矩,0.75N.m
■电源功率与发热量参考基准
电源功率与发热量根据机器人机型有所不同。请将下表作为参考基准探讨电源的准备及控制盘的大小、控制器的配置与冷却方法
| 轴电流传感器值 | 电源功率(VA) | 发热量(W) |
| 5 | 400 | 20 |
■接线用断路器安装
漏电断路器
由于控制器采用PWM 控制驱动马达,高频泄漏电流可能会引起安装在外部的漏电断路器的误动作。
因此,在外部安装漏电断路器时,请注意选择额定灵敏度电流(I n)。( 请在参考漏电断路器厂商资料的基础上,选择适合逆变器使用的漏电断路器使用。)
| 电源类型 | 泄漏电流 |
| 主电源(L、N) | 合计1mA |
| 控制电源(L1、N1) |
1. 上述泄漏电流值是采用漏电检测器( 日置马达生产的3283) 在低通滤波器ON (100Hz) 状态下测得的数值。2. 安装多台控制器时,请将每台的泄漏电流相加。3. 请务必进行接地。4. 根据电源线的安装状况,电源线与FG 之间的杂散电容会发生变化,从而导致泄漏电流也发生变化。■电路保护器
接通控制器电源或马达起动时,会产生额定电流几倍到10 几倍的冲击电流。在外部安装电路保护器时,请注意该动作特性。( 请在参考电路保护器厂商资料的基础上选择。)
| 输入电源 | 电压驱动器 | 额定电流(Arms) | 推荐特性 |
| AC200V | 205 | 2 | 带中速型或低速型惯性延迟机构 |
| AC100V | 105 | 4 |
■浪涌吸收器安装
为了保护设备不受因雷击产生的浪涌噪声的影响,请务必在外部安装浪涌吸收器。
| 推荐浪涌吸收器型号 | 厂商 |
| LT-C12G801WS | 双信马达( 株) |
■电磁接触器安装
为了能够满足客户对于安全等级的不同要求,本控制器取消了内部的主电源断电电路。
在选择了符合客户所要求安全等级的产品之后,请务必在主电源侧安装电磁接触器,构建主电源断电电路。
■噪声滤波器安装
为了防止受到通过电源线传导的噪声影响,请务必安装噪声滤波器。
| 推荐噪声滤波器型号 | 厂商 |
| EXRS-NF1 | 本产品为LOSEL 株式会社生产( 型号:NAP-10-472)。 |
| NF2010A-UP | 双信马达( 株) |
■EXRS-C21/C22通用 搭建紧急停止电路用零件示例
| 零件名称 | 数量 | 米思米型号 | 备注 |
| 继电器 | 1 | GPR-M-4CL-D24DB | 内置线圈浪涌吸收二极管 |
| 继电器端子台 | 1 | GPR-MS-4CD | |
| 紧急停止开关 | 1 | EBB2401 | 其他也有带操作盒类型 |
| DC24V电源 | 1 | ESP10-15-24 | 使用带有制动器的机器人时,需准备好。 |
| ※请确认电源容量 |
以上仅作参考,请结合客户安全规格进行选定。■米思米单轴机器人 说明手册 请参考
这里 关于此商品的常见问题 (FAQ)
联锁报警(NG.1=45)导致无法运行,该如何处理?
两种办法可以解决。第一种是打开支持软件RS-Manager(需要另行购买),点击软件左上窗口中的【Option Parameter】命令,将No.80参数Option enable设置为【Disable】(无效),再点击菜单栏上的[Write],即可消除报警。第二种是通过手持终端设备(需要另行购买)。方法一样。
请详细说明有关紧急停止回路图的相关内容。
紧急停止回路1:客户自备
紧急停止回路2:手持终端设备内置
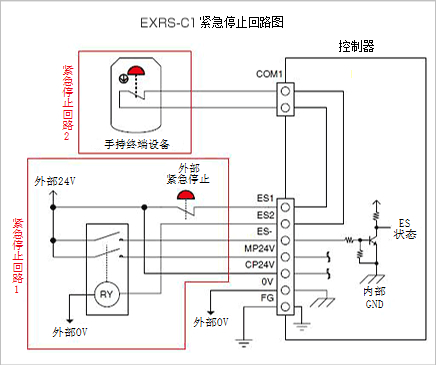
【控制器种类:C1】紧急停止回路图的说明
正常状态下,ES的状态通常是保持一定的电压。如果按压紧急停止按钮(红色半圆),继电器(RY)上的电压会变为0V,MP24V与ES-的接点会自动断开。
因此通过ES状态电压的变化情况,可以判断控制器是否发生了紧急情况。紧急停止报警(C1)输出后,等待ES状态的恢复。
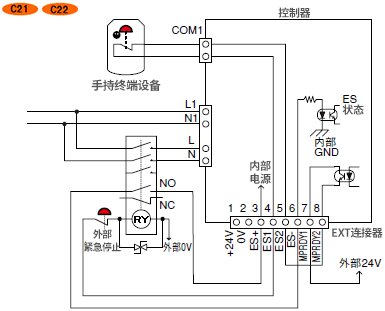
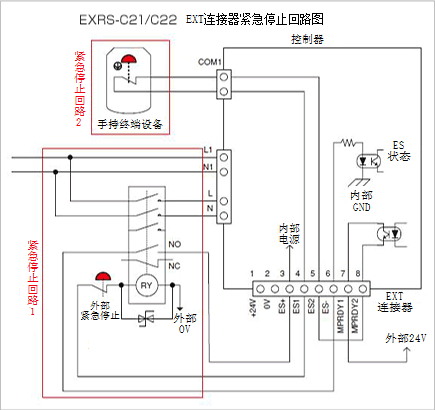
【控制器种类:C21/C22】EXT连接器紧急停止回路图的说明
正常状态下,ES的状态通常是保持一定的电压。如果按压紧急停止按钮(红色半圆),继电器(RY)上的电压会变为0V,MP24V与ES-的接点会自动断开。
因此通过ES状态电压的变化情况,可以判断控制器是否发生了紧急情况。
紧急停止报警(C1)输出后,等待ES状态的恢复。
<注意>
请务必确认继电器接点的电气容量。如果容量不够,请单个使用。
对于ES1、ES2紧急停止的配线,请接入电流300mA以内的负载。如果接入电流超过300mA的负载,或者不接负载,接通电流超过300mA,都有可能损坏控制器。
紧急停止回路2:手持终端设备内置
【控制器种类:C1】紧急停止回路图的说明
正常状态下,ES的状态通常是保持一定的电压。如果按压紧急停止按钮(红色半圆),继电器(RY)上的电压会变为0V,MP24V与ES-的接点会自动断开。
因此通过ES状态电压的变化情况,可以判断控制器是否发生了紧急情况。紧急停止报警(C1)输出后,等待ES状态的恢复。
【控制器种类:C21/C22】EXT连接器紧急停止回路图的说明
正常状态下,ES的状态通常是保持一定的电压。如果按压紧急停止按钮(红色半圆),继电器(RY)上的电压会变为0V,MP24V与ES-的接点会自动断开。
因此通过ES状态电压的变化情况,可以判断控制器是否发生了紧急情况。
紧急停止报警(C1)输出后,等待ES状态的恢复。
<注意>
请务必确认继电器接点的电气容量。如果容量不够,请单个使用。
对于ES1、ES2紧急停止的配线,请接入电流300mA以内的负载。如果接入电流超过300mA的负载,或者不接负载,接通电流超过300mA,都有可能损坏控制器。
看不懂因紧急停止导致主电源断开的回路图。
该回路图中,因紧急停止会造成外部继电器控制的主电源断开。各端子的功能如下所述。
【ES1、ES2】:紧急停止接点。经由控制器的COM1连接器,与H1(手持终端设备)的紧急停止相连接。
按压H1的紧急停止按钮,ES1-ES2之间将会被切断。
【ES-】:紧急停止状态检测端子。若接通DC24V电压则紧急停止状态解除,否则将处于紧急停止状态。
【MP24V】:主电源。驱动马达的输入电源。
【CP24V】:控制电源。启动控制器的输入电源。
【0V】:主电源、控制电源共用的输入电源。
【FG】:接地端子。
<注意>
请务必确认继电器接点的电气容量。如果容量不够,请单个使用。
对于ES1、ES2紧急停止的配线,请接入电流300mA以内的负载。如果接入电流超过300mA的负载,或者不接负载,接通电流超过300mA,都有可能损坏控制器。
【ES1、ES2】:紧急停止接点。经由控制器的COM1连接器,与H1(手持终端设备)的紧急停止相连接。
按压H1的紧急停止按钮,ES1-ES2之间将会被切断。
【ES-】:紧急停止状态检测端子。若接通DC24V电压则紧急停止状态解除,否则将处于紧急停止状态。
【MP24V】:主电源。驱动马达的输入电源。
【CP24V】:控制电源。启动控制器的输入电源。
【0V】:主电源、控制电源共用的输入电源。
【FG】:接地端子。
<注意>
请务必确认继电器接点的电气容量。如果容量不够,请单个使用。
对于ES1、ES2紧急停止的配线,请接入电流300mA以内的负载。如果接入电流超过300mA的负载,或者不接负载,接通电流超过300mA,都有可能损坏控制器。
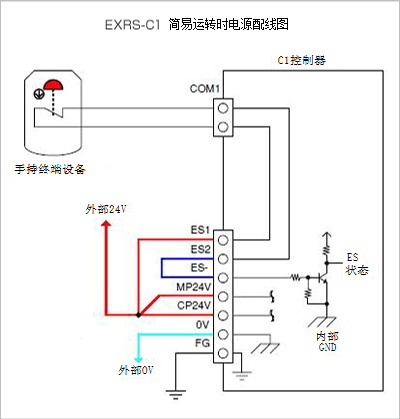
关于电源连接器的配线,如果无需设置外部紧急停止回路,该如何正确接线?
请按照以下方法进行配线(参照下图)
【控制器种类:C1】
将DC24V电源的负极连接到电源连接器的0V上(水色)
将DC24V电源的正极连接到电源连接器的MP24V、CP24V、ES1上(红色)
将电源连接器的ES2和ES-短接(蓝色)
【控制器种类:C21/C22】
连接电源连接器的[L]和[L1],以及[N]和[N1]。
短接EXT连接器的[ES+]和[ES1],以及[ES2]和[ES-]。
※短接电源连接器的紧急停止
※手持终端设备(EXRS-H1)的紧急停止按钮可有效使用。
补充: 该实例的手持终端设备时连接在控制器的COM1上。正常状态下,ES状态通常是保持一定的电压,如果按压紧急停止按钮(红色半圆),ES状态的电压会下降,从而判断控制器有紧急情况发生。由于给马达供电的电源没有在外边被切断,所以控制器在内部切断电源,输出紧急停止报警(C1)后,等待ES状态的恢复。由于PC通信电缆和附件虚拟连接器可以在插头内部短路COM1,所以可以省略与COM1相连接的紧急停止按钮。请注意如果控制器COM1什么也不连接,那么ES1到ES2之间的配线将被切断,从而判断控制器有紧急停止情况。
【控制器种类:C1】
将DC24V电源的负极连接到电源连接器的0V上(水色)
将DC24V电源的正极连接到电源连接器的MP24V、CP24V、ES1上(红色)
将电源连接器的ES2和ES-短接(蓝色)
【控制器种类:C21/C22】
连接电源连接器的[L]和[L1],以及[N]和[N1]。
短接EXT连接器的[ES+]和[ES1],以及[ES2]和[ES-]。
※短接电源连接器的紧急停止
※手持终端设备(EXRS-H1)的紧急停止按钮可有效使用。
补充: 该实例的手持终端设备时连接在控制器的COM1上。正常状态下,ES状态通常是保持一定的电压,如果按压紧急停止按钮(红色半圆),ES状态的电压会下降,从而判断控制器有紧急情况发生。由于给马达供电的电源没有在外边被切断,所以控制器在内部切断电源,输出紧急停止报警(C1)后,等待ES状态的恢复。由于PC通信电缆和附件虚拟连接器可以在插头内部短路COM1,所以可以省略与COM1相连接的紧急停止按钮。请注意如果控制器COM1什么也不连接,那么ES1到ES2之间的配线将被切断,从而判断控制器有紧急停止情况。
PLC(上位机、外部设备)发出的信号,无法实现原点复位,请告知设定方法。
打开支持软件RS-Manager,点击Option Parameter,将No.80参数Option enable设置为[Enable](有效),等待联锁信号ON,执行原点复位。
控制器的LED指示灯呈现亮灯状态,是否出现了异常?
根据LED指示灯的亮灯状态显示控制器的状态。请参考以下内容。

RS机器人带马达么?
带的,马达内置在本体内。
RS机器人马达是是什么品牌的?
日本多摩川制造,在市面上买不到,特意为这款产品开发的小马达。
RS控制器有点位控制和脉冲控制,有什么去区别?
点位控制是通过RS-Manager,提前设置好要走的点的位置,之后通过PLC调用。操作简单,但要求事先能确定要走的点的精确位置。
脉冲控制是通过能发脉冲的PLC,通过脉冲和方向进行实时定义点的位置。
脉冲控制是通过能发脉冲的PLC,通过脉冲和方向进行实时定义点的位置。
常被一起浏览的商品
常被一起购买的商品
相关产品集合页
单价(未税):
数量:



总价(含税):
总价(未税):
总价(未税):
分享
客服
产品目录
加入购物车
| 数量 | 未税单价 (元) | 发货日 |
|---|