单轴机器人RS3 滑块型





限时特价
当天发货
可按购买数量进行折扣
单轴机器人RS3 滑块型
型号:
重选 
型号:
请确定型号
原价:
单价(未税):
购买条件:
发货日:
基本信息
规格表
FAQ
产品概述
米思米RS是特制电机内置的机器人本体、控制器、线缆配套组成的单轴机器人,又称电缸。
为推动中国工厂产线自动化,我们提供滑台型、轴杆型、皮带驱动型、洁净规格等品种,方便您根据使用环境进行选择。

为推动中国工厂产线自动化,我们提供滑台型、轴杆型、皮带驱动型、洁净规格等品种,方便您根据使用环境进行选择。

产品特点
| 类型 | 产品图 | 单轴机器人RS 特点 | 说明 | 图示 |
| 小型低成本机器人 RS1/2/3 系列 |  | 1.旋转编码器 | 采用旋转编码器检测马达的旋转角度与普通的光学式编码器相比,可靠性更高。 |  |
| 2.4列2点接触式单圆弧形沟槽导轨 | 自动调节能力强,即使机器人安装面的刚性精度较低,也能顺畅运行。 由于滑差量小,即使承受重载,也能长期维持运行。 |  | ||
| 3.层压型接触刮板及特有润滑装置 | 刮板采用多层叠加接触式构造,能多次清除附在轴杆上的细小异物,防止杂物侵入主体内部。 内置润滑装置,可长期免维护。 |  |
尺寸图

规格概述
■机器人材质 表面处理
■附件
■普通规格
■基本规格
(注)最高速度因行程而异。请参阅最高速度表。
■规格表

■型号
( 1)垂直使用时请选择带制动器的产品。(不能选择导程为20的带制动器产品)
1)垂直使用时请选择带制动器的产品。(不能选择导程为20的带制动器产品)
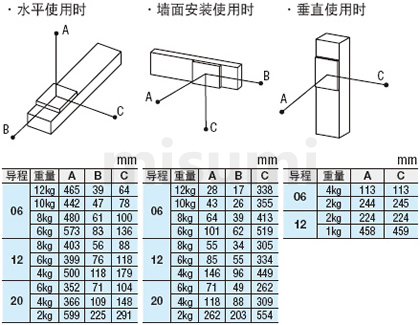
■尺寸、重量
带制动器的重量再增加0.2kg。
■追加工


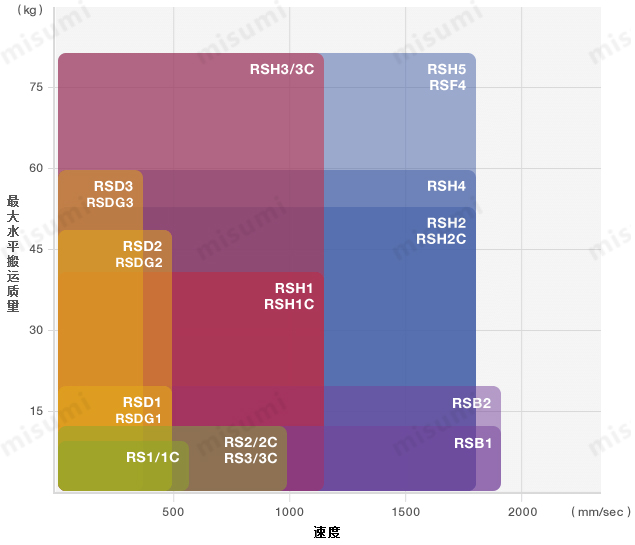
■RS水平搬运质量-速度
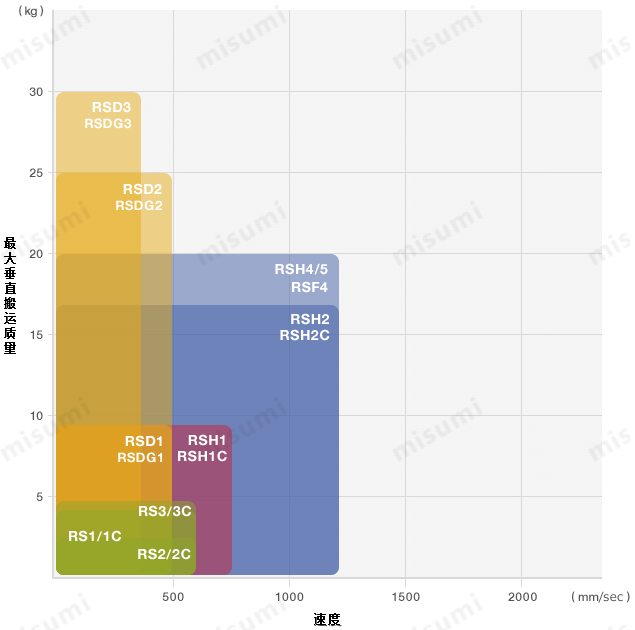
■RS垂直搬运质量-速度
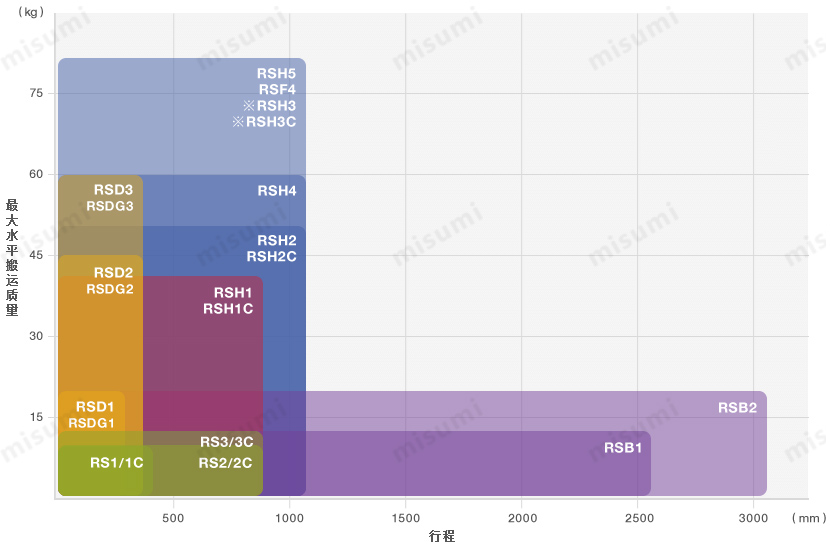
■RS水平搬运质量—行程
控制器规格 循环时间线图 请参考 这里
这里
| 构成零件 | 导轨 | 滑块 | 侧盖 |
 材质 材质 | 铁 | 铝合金 | 铝合金 |
 表面处理 表面处理 | - | - | 阳极氧化处理 |
■附件
 附件 附件 | 控制器输入、输出规格 | ||
| NPN,PNP | CC-Link | DeviceNet | |
| 使用说明CD-ROM、电源连接器、虚拟连接器 | |||
| - | CC-Link接头 | DeviceNet连接器 | |
■普通规格
| 滚珠丝杆 | 马达 | 位置检测器 | 使用环境 |
| 直径 12 (C10压扎) | 步进马达 | 旋转编码器(增量型) | 0~40摄氏度 35%~85%RH(无结露) |
■基本规格
| Type | 导程 (mm) | 重复定位 精度(mm) | 最大传送物重量(kg) | 最大压紧力 (N) | 行程 (mm) | 最高速度(注) (mm/sec) | 额定行走寿命 | 控制器 输入电源 | 最大定位 点数 | |
| 水平 | 垂直 | |||||||||
| RS3 | 06 | ±0.02 | 12 | 4 | 120 | 50~800 (以50为单位) | 300~190 | 10,000km以上 | DC24V ±10% | 255分 |
| 12 | 8 | 2 | 60 | 600~380 | ||||||
| 20 | 6 | - | 36 | 1000~633 | ||||||
■规格表

■型号
| 型式 | 选择 | |||||
| Type | 导程(mm) | 有无制动器( 1) 1) | 控制器种类 | 输入输出种类 | 电缆长度(m) | 行程(mm) |
| RS3 | 06 | 无:标注“无” 有:B | C1 DC24V ±10% | NPN:N PNP:P CC-Link:C DeviceNet:D | 1 3 5 10 (耐弯曲电缆) | 50~800 (指定单位50mm) |
| 12 | ||||||
| 20 | ||||||
1)垂直使用时请选择带制动器的产品。(不能选择导程为20的带制动器产品)■尺寸、重量
| Type | 尺寸、重量 | 行程(mm) | |||||||||||||||
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | ||
| RS3 | L(mm) | 336 | 386 | 436 | 486 | 536 | 586 | 636 | 686 | 736 | 786 | 836 | 886 | 936 | 986 | 1036 | 1086 |
| A | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | |
| B | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | |
| C(mm) | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | |
| 重量(kg) | 2.4 | 2.6 | 2.8 | 3.0 | 3.2 | 3.4 | 3.6 | 3.8 | 4.0 | 4.2 | 4.4 | 4.5 | 4.7 | 4.9 | 5.1 | 5.3 | |
带制动器的重量再增加0.2kg。■追加工


■RS水平搬运质量-速度

■RS垂直搬运质量-速度

■RS水平搬运质量—行程
 控制器规格 循环时间线图 请参考
控制器规格 循环时间线图 请参考 这里
这里使用方法
■系统组成
| 安装定位方法 | 型号 | 螺栓 | 紧固扭矩 |
 | RS1 | 内六角M5螺栓、强度8.8T 长度:底座厚度 +8mm 以下 | 60kgf•cm ~ 90kgf•cm |
| RS2/RS3 | 内六角M6螺栓、强度8.8T 长度:底座厚度 +8mm 以下 | 100kgf•cm ~ 130kgf•cm | |
| 系统组成 | 组成部件(案例) | ||
 | 手持终端设备(选配件) EXRS-H1 EXRS-HD1 | ||
| 支持软件(选配件) EXRS-ST1 EXRS-ST2 | |||
| 高位控制装置(PLC等) 客户自备 | |||
| RS102B-C1-N-3-400 | |||
使用案例

注意事项
■单轴机器人使用环境
使用环境: 0 ~40℃
允许环境相对湿度:35 ~85% RH 以下 ( 无结露)
■为了保证控制器正常动作,请避免在下列环境中使用
①含有硫酸、盐酸等腐蚀性气体和可燃性气体、易燃性液体的环境
②粉尘、灰尘较多的场所
③其他机器的切屑和油、水会溅到的场所
④有较大震动的场所
⑤会产生电磁干扰、静电干扰的场所
⑥日光直射场所
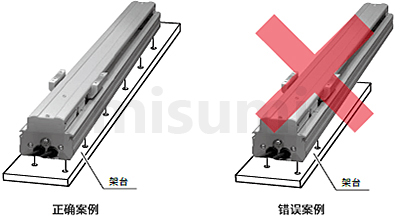
■安装机器人所使用的底座必须符合下列条件。
初次使用者,请务必阅览单轴机器人使用说明书。
①安装底座在机器人动作中会受到较大的反作用力,因此应使用具有足够刚性和稳定性的物体。
②底座的机器人安装面的平面度和水平度应精度在±0.05/500mm以内。
③请使用指定数量的螺栓以及有足够大小安装机器人的底座。在底座上安装机器人的螺栓不得低于规定数量,避免有右下图所示只固定一半。
使用环境: 0 ~40℃
允许环境相对湿度:35 ~85% RH 以下 ( 无结露)
■为了保证控制器正常动作,请避免在下列环境中使用
①含有硫酸、盐酸等腐蚀性气体和可燃性气体、易燃性液体的环境
②粉尘、灰尘较多的场所
③其他机器的切屑和油、水会溅到的场所
④有较大震动的场所
⑤会产生电磁干扰、静电干扰的场所
⑥日光直射场所
■安装机器人所使用的底座必须符合下列条件。
初次使用者,请务必阅览单轴机器人使用说明书。
①安装底座在机器人动作中会受到较大的反作用力,因此应使用具有足够刚性和稳定性的物体。
②底座的机器人安装面的平面度和水平度应精度在±0.05/500mm以内。
③请使用指定数量的螺栓以及有足够大小安装机器人的底座。在底座上安装机器人的螺栓不得低于规定数量,避免有右下图所示只固定一半。

计算软件

相关产品
| 单轴驱动器 LX26 | 单轴驱动器 LXH30 | 经济型 单轴驱动器 LS12 | ||
 |  |  | ||
| 代表型号: LX2610-B1-A2640-400 | 代表型号: LXH3010C-B1-A3038-600 | 代表型号: LS1205-60-A40 |
应用业界
| 电子/家电 | 汽车 | 医疗 | ||
 |  |  | ||
| 智能手机 | 半导体 | 锂电池 | ||
 |  |  |
尺寸图

规格表

■型号
| 型式 | 选择 | |||||
| Type | 导程(mm) | 有无制动器(1) | 控制器种类 | 输入输出种类 | 电缆长度(m) | 行程(mm) |
| RS3 | 06 | 无:标注“无” 有:B | C1 DC24V ±10% | NPN:N PNP:P CC-Link:C DeviceNet:D | 1 3 5 10 (耐弯曲电缆) | 50~800 (指定单位50mm) |
| 12 | ||||||
| 20 | ||||||
1)垂直使用时请选择带制动器的产品。(不能选择导程为20的带制动器产品)■尺寸、重量
| Type | 尺寸、重量 | 行程(mm) | |||||||||||||||
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | ||
| RS3 | L(mm) | 336 | 386 | 436 | 486 | 536 | 586 | 636 | 686 | 736 | 786 | 836 | 886 | 936 | 986 | 1036 | 1086 |
| A | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | |
| B | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | |
| C(mm) | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | |
| 重量(kg) | 2.4 | 2.6 | 2.8 | 3.0 | 3.2 | 3.4 | 3.6 | 3.8 | 4.0 | 4.2 | 4.4 | 4.5 | 4.7 | 4.9 | 5.1 | 5.3 | |
带制动器的重量再增加0.2kg。■容许外伸量

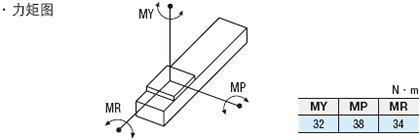
■静态容许力矩

 本控制器无内置紧急停止回路。请根据法令,根据您需要的安全类型构筑相对应的外部紧急停止回路。带制动器4A以上
本控制器无内置紧急停止回路。请根据法令,根据您需要的安全类型构筑相对应的外部紧急停止回路。带制动器4A以上■EXRS-P1 控制器

■逻辑图

■紧急停止电路示例 EXRS-P1
电源连接器配备有构建包含机器人在内的安全电路所需的功能。以下为电源连接器与上级装置的连接示例。
 为了能够满足客户对于安全等级的不同要求,P1 取消了内部的主电源断电电路。 请务必在外部构建主电源断电电路与紧急停止电路。将(+24V) 电源直接连接到ES- 时,将无法通过外部使其紧急停止,非常危险。请务必构建紧急停止电路。
为了能够满足客户对于安全等级的不同要求,P1 取消了内部的主电源断电电路。 请务必在外部构建主电源断电电路与紧急停止电路。将(+24V) 电源直接连接到ES- 时,将无法通过外部使其紧急停止,非常危险。请务必构建紧急停止电路。■电源连接器
使用附带的电源连接器连接电源。
 | |
| 信号名称 | 内容 |
| NC | 未连接端子 |
| ES- | 紧急停止准备信号( 断开:紧急停止) |
| MP24V | 主电源24V |
| CP24V | 控制电源24V |
| 0V | 电源0V |
 | 接地端子 |
■电源连接示例
 主电源切断用触点。请务必搭建主电源断路电路,以形成紧急停止电路。
主电源切断用触点。请务必搭建主电源断路电路,以形成紧急停止电路。■供电电源
| 电压 | DC24V±10% |
| 电流 | 控制电源 0.5A/ 台 |
| 主电源 2.5 ~ 4.0A/ 台 | |
| 推荐电线 | 0.5 ~ 0.75sq (AWG20 ~ 18) |
如果供给P1 的电流不足,可能会报警停止或发生异常动作。在选择24V 电源时请特别注意。由于P1 采用电容输入式电源,接通电源时,会产生较大的冲击电流。请勿使用速断型断路器或保险丝。此外,也应避免以10 秒以下的间隔反复开/ 关电源。否则可能会导致P1 内部主电路元件老化。■紧急停止电路示例 EXRS-C1
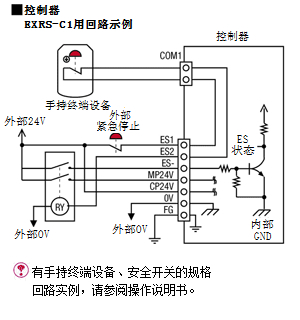
电源连接器配置了搭建机器人等安全电路所需的功能。电源连接器与上级装置的连接示例如下所示。
 为了灵活应对用户要求的安全形式,本控制器去除了内部的主电源断路电路。 因此,请务必搭建外部的主电源断路电路,以形成紧急停止电路。将(+24V) 电源直接连接到ES- 时,将无法通过外部使其紧急停止,包括手持编程器的紧急停止按钮也会无法使用,非常危险。请务必将ES1、ES2 的端子组合在一起,构建紧急停止电路。
为了灵活应对用户要求的安全形式,本控制器去除了内部的主电源断路电路。 因此,请务必搭建外部的主电源断路电路,以形成紧急停止电路。将(+24V) 电源直接连接到ES- 时,将无法通过外部使其紧急停止,包括手持编程器的紧急停止按钮也会无法使用,非常危险。请务必将ES1、ES2 的端子组合在一起,构建紧急停止电路。■电源连接器
使用附带的电源连接器连接电源。
 | |
| 信号名称 | 内容 |
| NC | 未连接端子 |
| ES- | 紧急停止准备信号( 断开:紧急停止) |
| MP24V | 主电源24V |
| CP24V | 控制电源24V |
| 0V | 电源0V |
| 接地端子 |
为了防止因噪声造成的设备误动作,请务必给接地端子接地。■电源连接示例
 请务必同紧急停止触点一道搭建了主电源断路电路,以形成紧急停止电路。请勿接错电源电压以及端子。否则可能会造成故障。
请务必同紧急停止触点一道搭建了主电源断路电路,以形成紧急停止电路。请勿接错电源电压以及端子。否则可能会造成故障。■供电电源
| 电压 | DC24V±10% |
| 电流 | 控制电源 0.5A/ 台 |
| 主电源 2.5 ~ 4.0A/ 台 | |
| 推荐电线 | 0.5 ~ 0.75sq (AWG20 ~ 18) |
如果供给控制器的电流不足,可能会报警停止或发生异常动作。在选择24V 电源时请特别注意。由于本控制器采用电容输入式电源,接通电源时,会产生较大的冲击电流。请勿使用速断型断路器或保险丝。此外,也应避免以10 秒以下的间隔反复开/ 关电源。否则可能会导致控制器内部主电源元件老化。
■发热量的参考基准
请将下表作为参考基准探讨控制盘的大小、控制器的配置与冷却方法。
| 发热量(W) | 18 |
■EXRS-C1/P1通用 搭建紧急停止电路用零件示例
| 零件名称 | 数量 | 米思米型号 | 备注 |
| 继电器 | 1 | GPR-M-2CL-D24DB | 内置线圈浪涌吸收二极管 |
| 继电器端子台 | 1 | GPR-MS-2CD | |
| 紧急停止开关 | 1 | EBB2401 | 其他也有带操作盒类型 |
| DC24V电源 | 1 | ESP10-100-24 | 请确认电源容量 |
以上仅作参考,请结合客户安全规格进行选定。■米思米单轴机器人 说明手册 请参考
这里 关于此商品的常见问题 (FAQ)
联锁报警(NG.1=45)导致无法运行,该如何处理?
两种办法可以解决。第一种是打开支持软件RS-Manager(需要另行购买),点击软件左上窗口中的【Option Parameter】命令,将No.80参数Option enable设置为【Disable】(无效),再点击菜单栏上的[Write],即可消除报警。第二种是通过手持终端设备(需要另行购买)。方法一样。
请详细说明有关紧急停止回路图的相关内容。
紧急停止回路1:客户自备
紧急停止回路2:手持终端设备内置
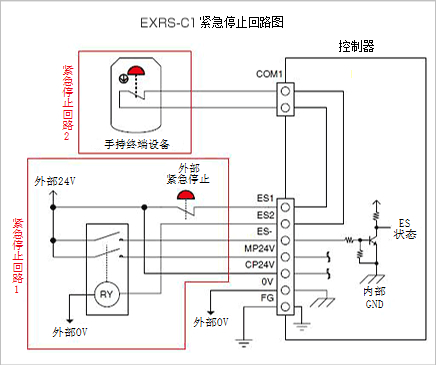
【控制器种类:C1】紧急停止回路图的说明
正常状态下,ES的状态通常是保持一定的电压。如果按压紧急停止按钮(红色半圆),继电器(RY)上的电压会变为0V,MP24V与ES-的接点会自动断开。
因此通过ES状态电压的变化情况,可以判断控制器是否发生了紧急情况。紧急停止报警(C1)输出后,等待ES状态的恢复。
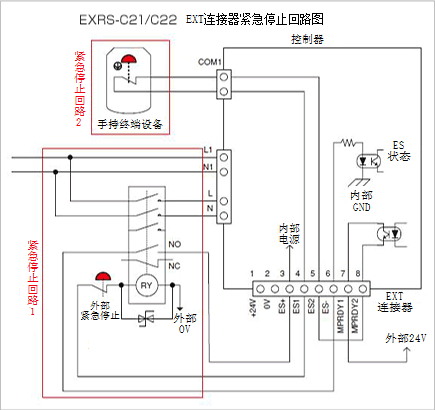
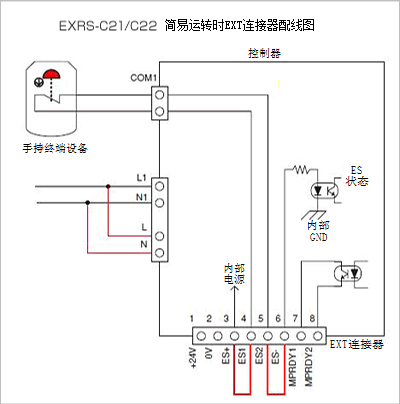
【控制器种类:C21/C22】EXT连接器紧急停止回路图的说明
正常状态下,ES的状态通常是保持一定的电压。如果按压紧急停止按钮(红色半圆),继电器(RY)上的电压会变为0V,MP24V与ES-的接点会自动断开。
因此通过ES状态电压的变化情况,可以判断控制器是否发生了紧急情况。
紧急停止报警(C1)输出后,等待ES状态的恢复。
<注意>
请务必确认继电器接点的电气容量。如果容量不够,请单个使用。
对于ES1、ES2紧急停止的配线,请接入电流300mA以内的负载。如果接入电流超过300mA的负载,或者不接负载,接通电流超过300mA,都有可能损坏控制器。
紧急停止回路2:手持终端设备内置
【控制器种类:C1】紧急停止回路图的说明
正常状态下,ES的状态通常是保持一定的电压。如果按压紧急停止按钮(红色半圆),继电器(RY)上的电压会变为0V,MP24V与ES-的接点会自动断开。
因此通过ES状态电压的变化情况,可以判断控制器是否发生了紧急情况。紧急停止报警(C1)输出后,等待ES状态的恢复。
【控制器种类:C21/C22】EXT连接器紧急停止回路图的说明
正常状态下,ES的状态通常是保持一定的电压。如果按压紧急停止按钮(红色半圆),继电器(RY)上的电压会变为0V,MP24V与ES-的接点会自动断开。
因此通过ES状态电压的变化情况,可以判断控制器是否发生了紧急情况。
紧急停止报警(C1)输出后,等待ES状态的恢复。
<注意>
请务必确认继电器接点的电气容量。如果容量不够,请单个使用。
对于ES1、ES2紧急停止的配线,请接入电流300mA以内的负载。如果接入电流超过300mA的负载,或者不接负载,接通电流超过300mA,都有可能损坏控制器。
看不懂因紧急停止导致主电源断开的回路图。
该回路图中,因紧急停止会造成外部继电器控制的主电源断开。各端子的功能如下所述。
【ES1、ES2】:紧急停止接点。经由控制器的COM1连接器,与H1(手持终端设备)的紧急停止相连接。
按压H1的紧急停止按钮,ES1-ES2之间将会被切断。
【ES-】:紧急停止状态检测端子。若接通DC24V电压则紧急停止状态解除,否则将处于紧急停止状态。
【MP24V】:主电源。驱动马达的输入电源。
【CP24V】:控制电源。启动控制器的输入电源。
【0V】:主电源、控制电源共用的输入电源。
【FG】:接地端子。
<注意>
请务必确认继电器接点的电气容量。如果容量不够,请单个使用。
对于ES1、ES2紧急停止的配线,请接入电流300mA以内的负载。如果接入电流超过300mA的负载,或者不接负载,接通电流超过300mA,都有可能损坏控制器。
【ES1、ES2】:紧急停止接点。经由控制器的COM1连接器,与H1(手持终端设备)的紧急停止相连接。
按压H1的紧急停止按钮,ES1-ES2之间将会被切断。
【ES-】:紧急停止状态检测端子。若接通DC24V电压则紧急停止状态解除,否则将处于紧急停止状态。
【MP24V】:主电源。驱动马达的输入电源。
【CP24V】:控制电源。启动控制器的输入电源。
【0V】:主电源、控制电源共用的输入电源。
【FG】:接地端子。
<注意>
请务必确认继电器接点的电气容量。如果容量不够,请单个使用。
对于ES1、ES2紧急停止的配线,请接入电流300mA以内的负载。如果接入电流超过300mA的负载,或者不接负载,接通电流超过300mA,都有可能损坏控制器。
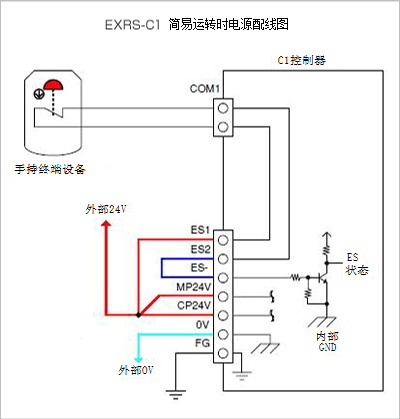
关于电源连接器的配线,如果无需设置外部紧急停止回路,该如何正确接线?
请按照以下方法进行配线(参照下图)
【控制器种类:C1】
将DC24V电源的负极连接到电源连接器的0V上(水色)
将DC24V电源的正极连接到电源连接器的MP24V、CP24V、ES1上(红色)
将电源连接器的ES2和ES-短接(蓝色)
【控制器种类:C21/C22】
连接电源连接器的[L]和[L1],以及[N]和[N1]。
短接EXT连接器的[ES+]和[ES1],以及[ES2]和[ES-]。
※短接电源连接器的紧急停止
※手持终端设备(EXRS-H1)的紧急停止按钮可有效使用。
补充: 该实例的手持终端设备时连接在控制器的COM1上。正常状态下,ES状态通常是保持一定的电压,如果按压紧急停止按钮(红色半圆),ES状态的电压会下降,从而判断控制器有紧急情况发生。由于给马达供电的电源没有在外边被切断,所以控制器在内部切断电源,输出紧急停止报警(C1)后,等待ES状态的恢复。由于PC通信电缆和附件虚拟连接器可以在插头内部短路COM1,所以可以省略与COM1相连接的紧急停止按钮。请注意如果控制器COM1什么也不连接,那么ES1到ES2之间的配线将被切断,从而判断控制器有紧急停止情况。
【控制器种类:C1】
将DC24V电源的负极连接到电源连接器的0V上(水色)
将DC24V电源的正极连接到电源连接器的MP24V、CP24V、ES1上(红色)
将电源连接器的ES2和ES-短接(蓝色)
【控制器种类:C21/C22】
连接电源连接器的[L]和[L1],以及[N]和[N1]。
短接EXT连接器的[ES+]和[ES1],以及[ES2]和[ES-]。
※短接电源连接器的紧急停止
※手持终端设备(EXRS-H1)的紧急停止按钮可有效使用。
补充: 该实例的手持终端设备时连接在控制器的COM1上。正常状态下,ES状态通常是保持一定的电压,如果按压紧急停止按钮(红色半圆),ES状态的电压会下降,从而判断控制器有紧急情况发生。由于给马达供电的电源没有在外边被切断,所以控制器在内部切断电源,输出紧急停止报警(C1)后,等待ES状态的恢复。由于PC通信电缆和附件虚拟连接器可以在插头内部短路COM1,所以可以省略与COM1相连接的紧急停止按钮。请注意如果控制器COM1什么也不连接,那么ES1到ES2之间的配线将被切断,从而判断控制器有紧急停止情况。
PLC(上位机、外部设备)发出的信号,无法实现原点复位,请告知设定方法。
打开支持软件RS-Manager,点击Option Parameter,将No.80参数Option enable设置为[Enable](有效),等待联锁信号ON,执行原点复位。
控制器的LED指示灯呈现亮灯状态,是否出现了异常?
根据LED指示灯的亮灯状态显示控制器的状态。请参考以下内容。

RS机器人带马达么?
带的,马达内置在本体内。
RS机器人马达是是什么品牌的?
日本多摩川制造,在市面上买不到,特意为这款产品开发的小马达。
RS控制器有点位控制和脉冲控制,有什么区别?
点位控制是通过RS-Manager,提前设置好要走的点的位置,之后通过PLC调用。操作简单,但要求事先能确定要走的点的精确位置。
脉冲控制是通过能发脉冲的PLC,通过脉冲和方向进行实时定义点的位置。
脉冲控制是通过能发脉冲的PLC,通过脉冲和方向进行实时定义点的位置。
常被一起浏览的商品
常被一起购买的商品
相关产品集合页
单价(未税):
数量:



总价(含税):
总价(未税):
总价(未税):
分享
客服
产品目录
加入购物车
| 数量 | 未税单价 (元) | 发货日 |
|---|